中嶋 秀朗
!!研究室ホームページは↓をクリック!!
【移動ロボットシステム研究室】Mobile Robot Systems Lab.
Chariot 3
胴体の前後に4脚と中央に2車輪を持つロボット.脚を触覚のように使うことで,外界センサを用いずとも山林を含めた荒れた不整地を移動可能にする移動制御法を考案しました.(これは東北大学中野研ドクターコースでの成果です.)

チャリべえ1,2号機
大人が搭乗した状態で不整地移動を可能にする脚車輪ロボット.愛知万博にて実演展示しました.(東北大学中野研ドクターコース及びfuRo勤務時の成果です.)

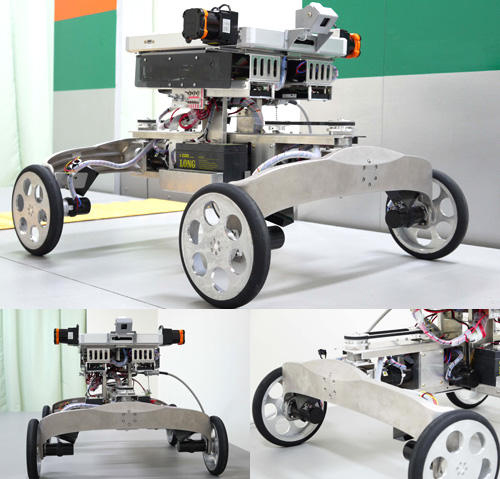
RT-Mover
最小の駆動軸数で,簡易4脚機能を持ち,荷物搭載部を水平に保って不整地を移動できるロボット.脚機能と車輪機能の両面を持ちつつ,メカニズムのシンプルさを追求しました.RT-Moverシリーズは,荷物運搬用途や警備用途,搭乗用途など不整地移動が必要なさまざまな分野の移動用プラットフォームとして発展可能です.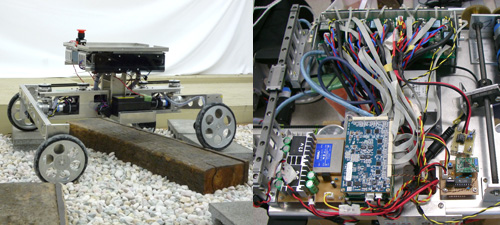
RT-Mover D-type
RT-Moverを踏襲し,外界センサシステムとの連携を考慮した2代目.マイナーチェンジ版.障害物回避や間合い制御などの移動ロボットシステムとしての観点からも研究を進めています.
RT-Mover P-type
2代目までの実験で得られた知見を元に,新たに拡張機能を持たせた搭乗型RT-Mover.不整地移動できるパーソナルモビリティとしてのさまざまな面から研究開発.
