中嶋 秀朗
!!研究室ホームページは↓をクリック!!
【移動ロボットシステム研究室】Mobile Robot Systems Lab.
社会連携
技術士(機械),APEC Engineer (Mechanical), International Professional Engineer, Japan資格保持者として,産業界と大学の研究をつなぐ社会との連携を意識した研究活動を積極的に行っています.
JR東日本との連携
近距離移動のパーソナルモビリティと中長距離輸送の鉄道システムを有機的に連携させることで,それぞれの移動システムの弱点を補完しあう新しい交通システムを提案します.それにより,車に強く依存した移動社会から,環境にやさしい公共交通機関がより前面に出てくる移動社会を目指します.これにより移動困難者が自律的に移動可能な,はつらつ社会の実現にも近づけます.
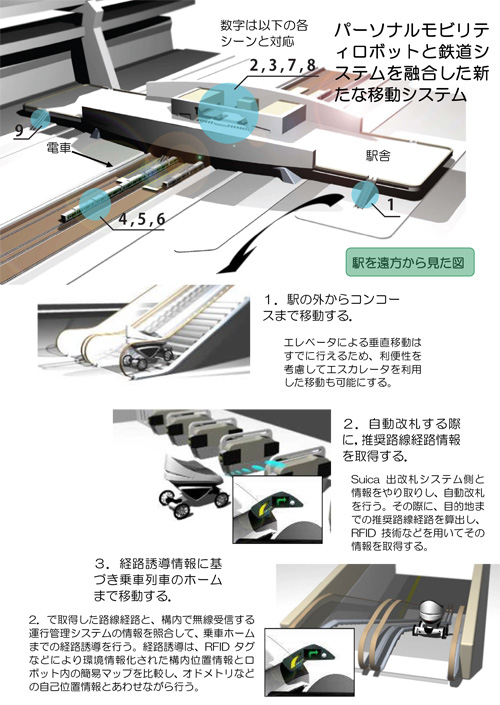
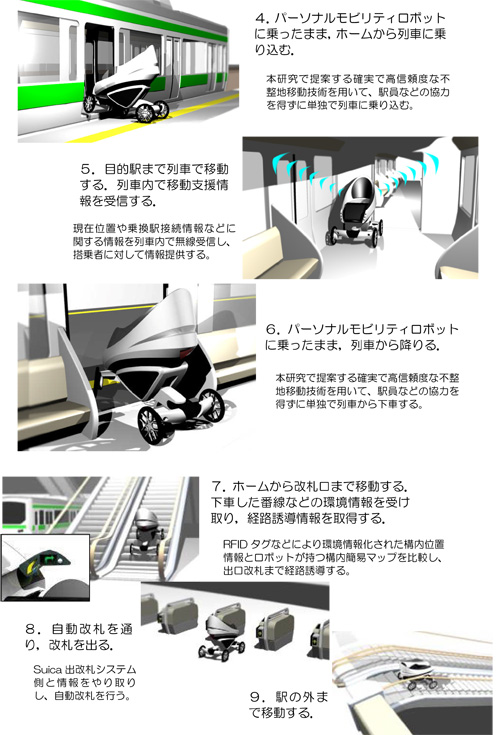
この新しい移動システムを実現するには,パーソナルモビリティは都市環境程度の不整地を移動できる能力が必要です.そのために,以下のような要素研究を行っています.
「運動能力に関する研究」

実用性を意識したシンプルなメカニズムで不整地を移動するための移動能 力向上に関する研究を行っています.機構や制御方法に関する研究です.
「センシング技術に関する研究」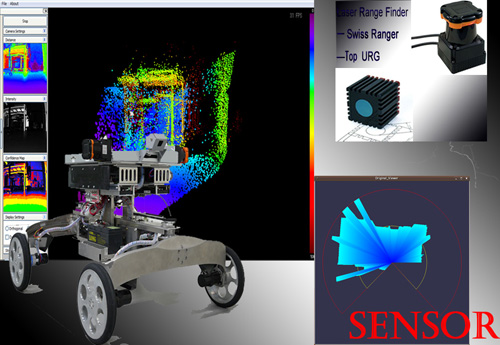
路面環境や周囲の環境を認識して,自律的にロボットが移動できるための 研究を行っています.3D距離センサ,2Dレーザレンジセンサなどを使い,情報の取 得とその解釈についての研究です.
「交通ロボティクスに関する研究」
複数の移動ロボットがいる環境では,衝突回避を始めとするマルチロボッ トシステムの制御方法が必要です.既存の交通システムの長所を抽出利用し,衝突回 避制御や間合い制御,優先制御などを構築する研究です.
「環境情報構造化に関する研究」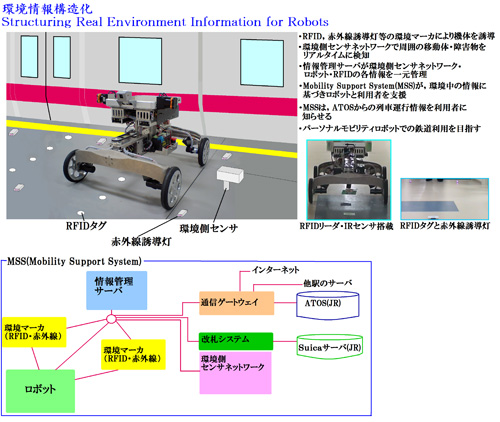
環境側にも実用性を意識したセンサを配置し,それらとロボットの搭載セ ンサを相互に用いて,誘導制御や情報提供するシステムの研究を行っています.IT技 術とRT技術を高度に融合する研究です.
「パーソナルモビリティを用いた実環境下での総合研究」
実環境下で,搭乗型の不整地移動可能なパーソナルモビリティ(写真右)の動作実験を行い,操縦性や乗り心地,制御性などの課題に総合的に取り組みます.実環境で動かすことで,見えなかった課題が明らかになり,実用化のフェーズに近づきます.
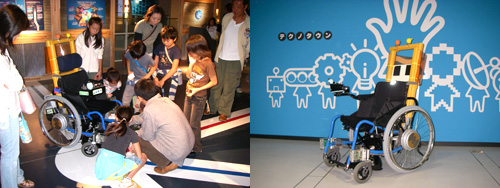
千葉市科学館との連携
科学館常設展示ロボットリリオン千葉市科学館の常設展示ロボットを開発し,現在も科学館で活躍しています.小学生に「分かりやすく」,「ロボットを体験できる」がコンセプトです.