ロボット機構学 米田 完
この講義は未来ロボティクス学科1年次前期に開講します。
大学に入ってはじめてロボット工学を学ぶ学生に向け、
・機構設計の考え方、図面の描き方
・アクチュエータの特性と使い方
・減速機と力と速度の関係
・センサの原理と使い方
・フィードバック制御の概念
・車輪型ロボットの機構、運動、加速と減速
・マニピュレータの機構、運動、手先の力と各関節トルクの関係
・歩行ロボットの機構、運動、バランスの取り方
を解説します。
単なる知識でなく原理と考え方を示し、広い範囲に応用の効く概念を紹介します。
講義中には部品の実物を回覧したり、ロボットの実演やビデオ紹介もしています。
各回の内容紹介(順次更新中)
1回の授業は180分です
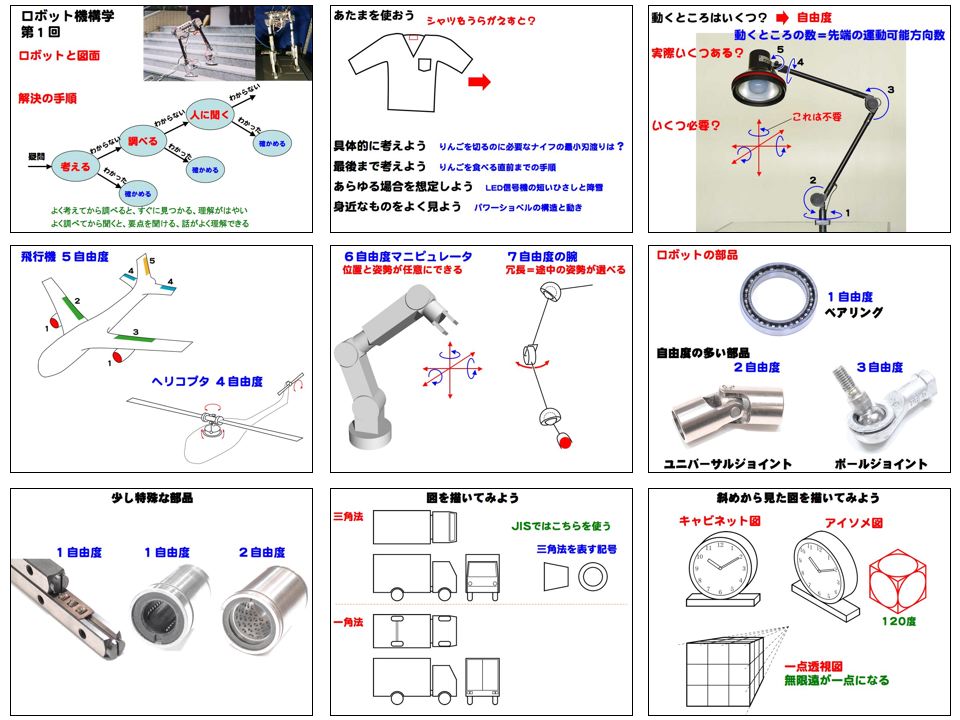
第1回(2007)ロボットと図面
配布資料
授業中の演習:トラックの3面図を描こう。サイコロを斜めから見た立体的な絵を描こう(目の丸の形も考えて)。
宿題:パワーショベルの動いているところを見て、どんな構造になっていて、どんな動きができるか絵を描いて説明しよう。
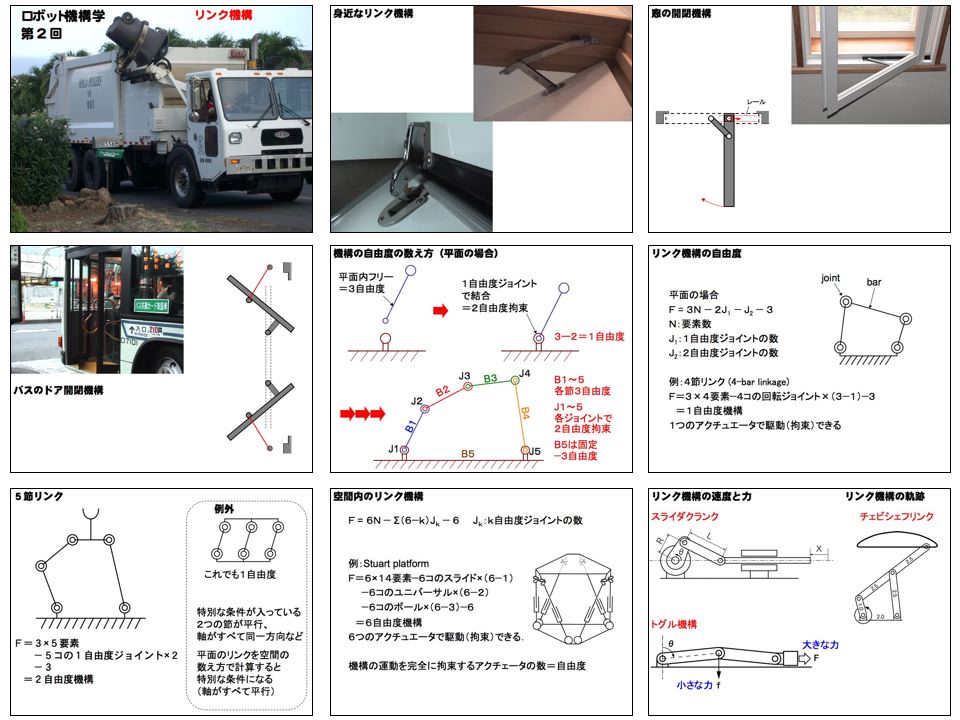
第2回(2007)リンク機構
配布資料
授業中の演習:アナログ腕時計の日付リングは1周に1〜31が入っているので文字が小さい。もっと大きく出す機構を考えよう。
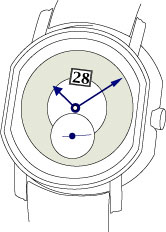 こんなに大きい数字では1周に31まで入らない
こんなに大きい数字では1周に31まで入らない
 授業中の話題:ベアリングの玉はどうやって入れる?
授業中の話題:ベアリングの玉はどうやって入れる?
宿題:棚の扉のリンク型蝶番を観察し、構造を図にして解説しよう。
第3回(2007)リンク機構の設計
配布資料
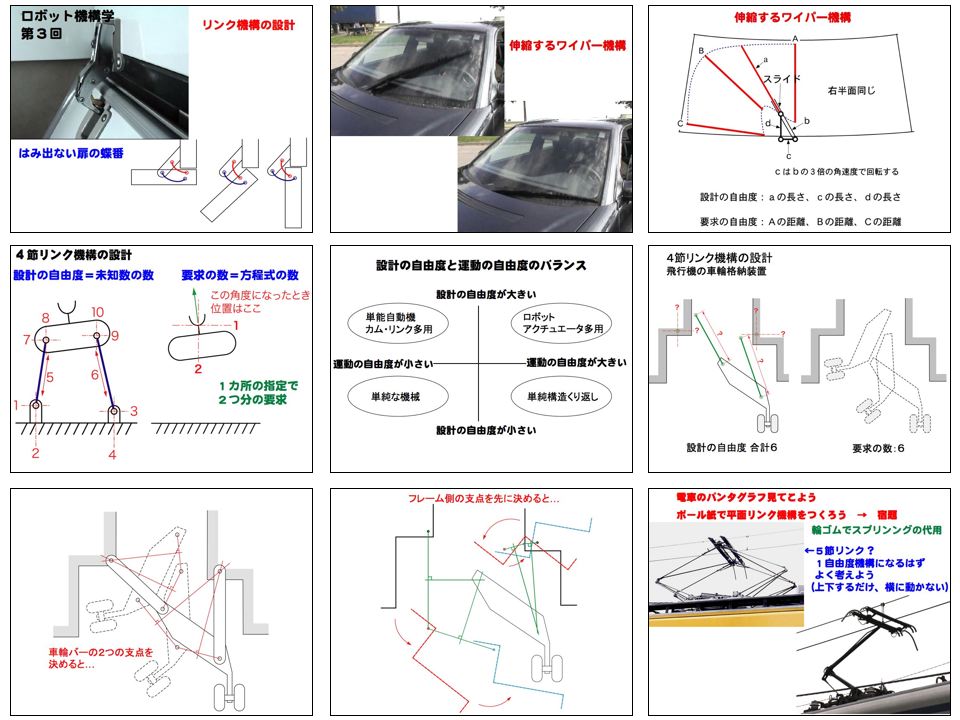
授業中の演習:飛行機の車輪格納リンクをボール紙と画鋲で製作しよう
宿題:電車のパンタグラフを観察し、平面リンク機構としてボール紙と画鋲と輪ゴムで製作しよう。
 平衡装置が付いている
平衡装置が付いている
第4回(2007)アクチュエータの特性
配布資料
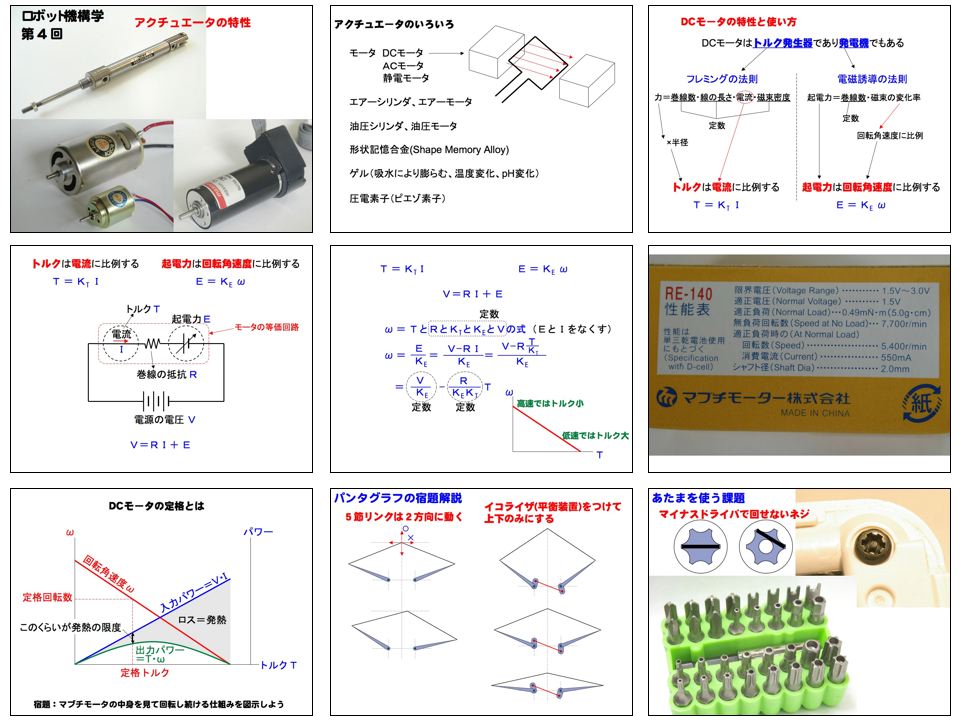
授業中の演習:電動ドライバ,扇風機,人間の自転車こぎ,クルマのエンジンの角速度vsトルクの特性を予想してグラフにしよう。
普通の工具では回しにくい新しいネジ頭を考案してみよう
宿題:DCモータの中身を見て、電機子(コイル)が回転すると極性が切り換って回転し続ける仕組みを図示して説明しよう。
 回転したら極性を切り換える整流子
回転したら極性を切り換える整流子
第5回(2007)駆動機構の設計(減速比の決め方)
配布資料
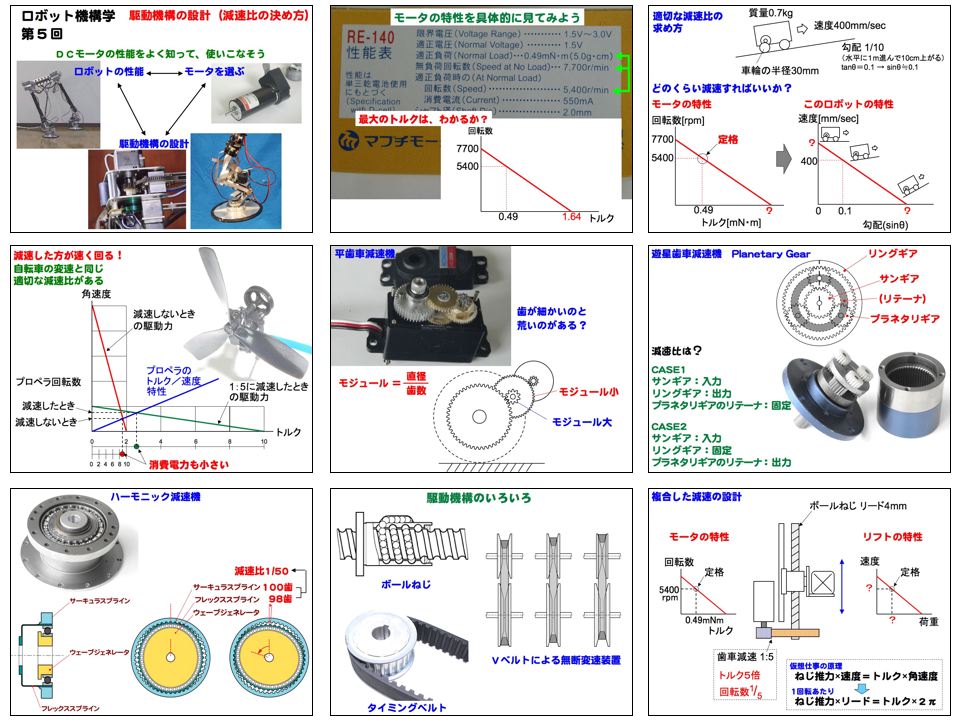
授業中の演習:テニスネット張り装置のハンドル回転トルクとワイヤ張力の関係を求める。
(ウオームギア減速比と巻取ドラム半径を使う)
自転車で坂道を上るときのペダル踏力を求める。ペダル回転数と走行速度の関係を求める。
(タイヤ半径、ペダル半径、チェーンの減速比、体重+車重を使う)
宿題:実際の減速比がどのくらいか、現物の歯数をかぞえて調べよう。
(自転車、ミニ四駆、テニスのネット張り、電動ドライバ、ラジコンサーボモータ)
第6回(2007)センサとシステム構成
配布資料
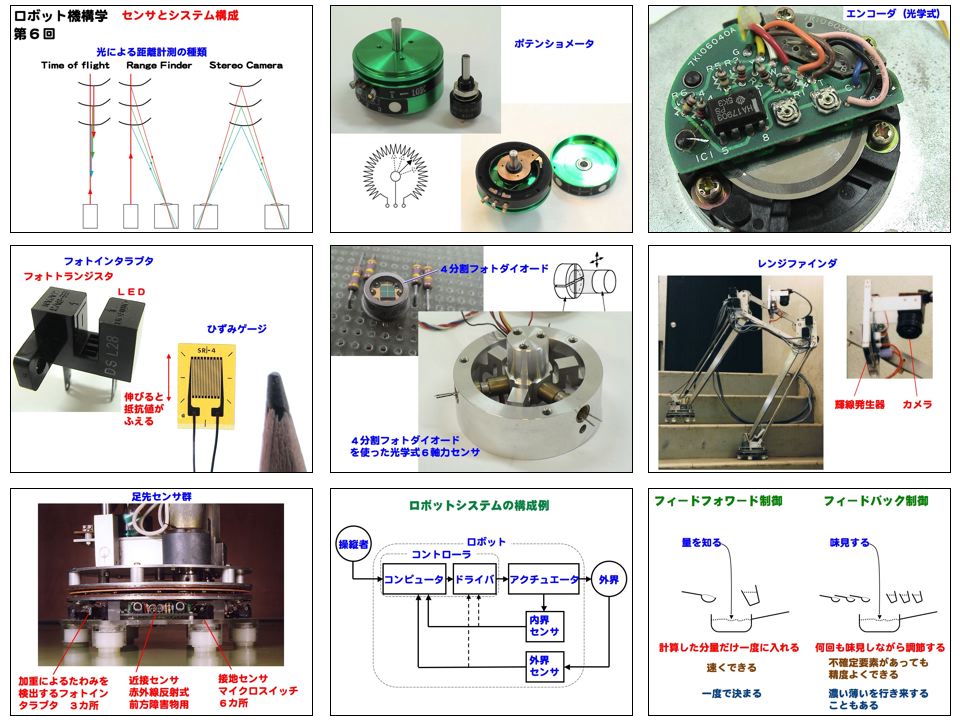
授業中の演習:モータの特性を理解して減速比を設計する(電動自転車をつくろう)
宿題:身の回りでセンサを使ってフィードバック、フィードフォワード制御をしている例を調べよう
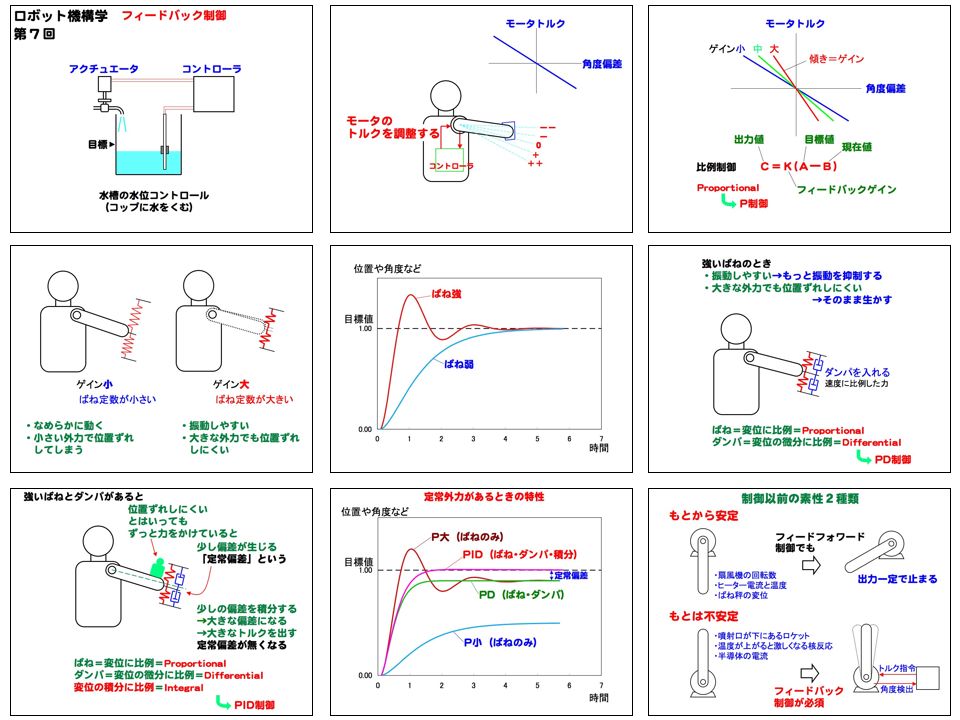
第7回(2007)フィードバック制御
配布資料
 フィードバック制御の実演模型
フィードバック制御の実演模型
 授業中のビデオの1コマ
授業中のビデオの1コマ
フィードフォワード段差越え フィードバック姿勢制御
授業中の演習:ヒューマノイドの膝関節モータの減速比を求める。
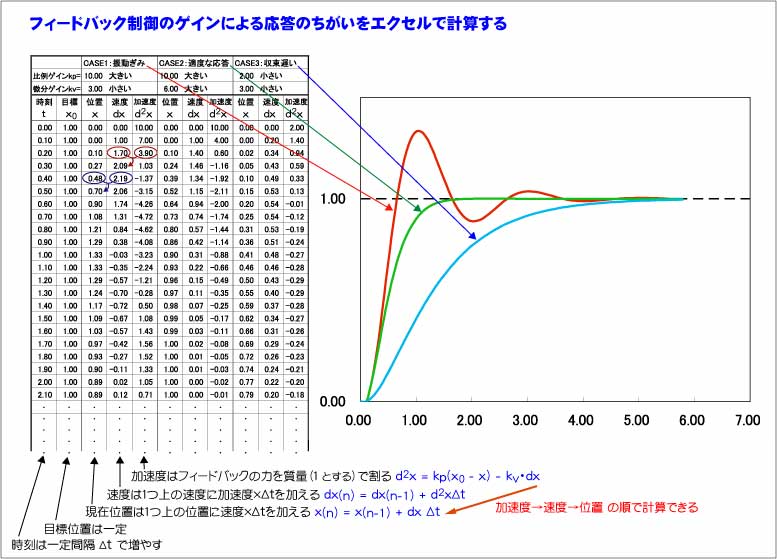
宿題:比例制御のゲインの違いによる挙動の違いをエクセルを使って計算する。
↓ 宿題解説資料(翌週配布)
第8回(2007)車輪型ロボット
配布資料
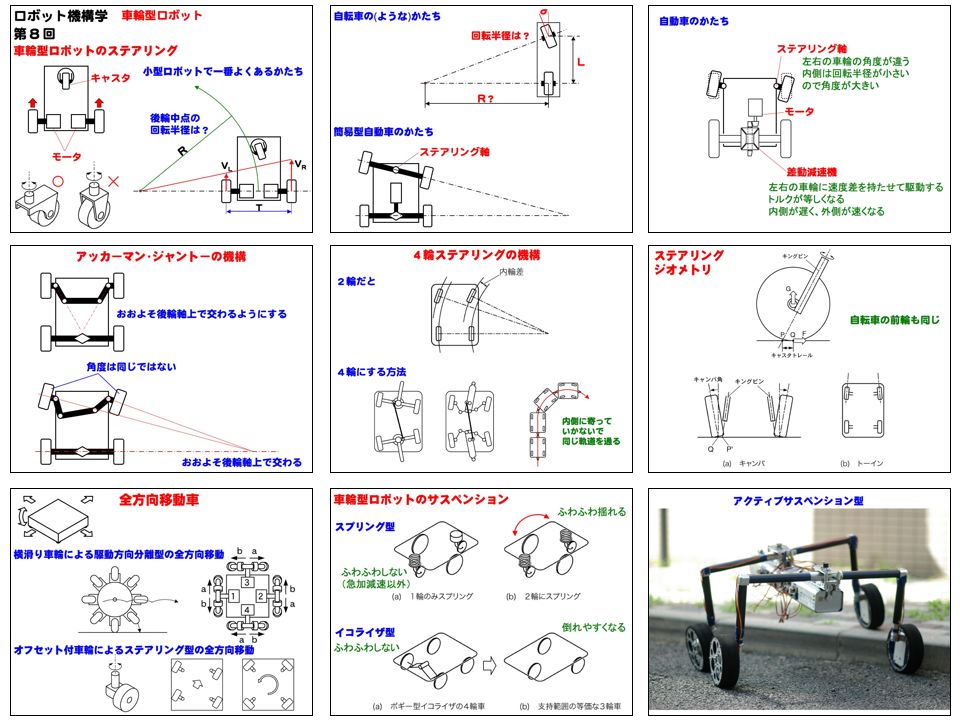
 授業中の実演:全方向移動車
授業中の実演:全方向移動車
授業中の演習:(1)左右の車輪の速度から回転半径を求める。(2)前輪のステアリング角度から回転半径を求める。
宿題:独立2輪駆動の2つの車輪速度時系列から車両の軌道をエクセルを使って計算する。
第9回(2007)腕型ロボットの機構と制御その1
配布資料
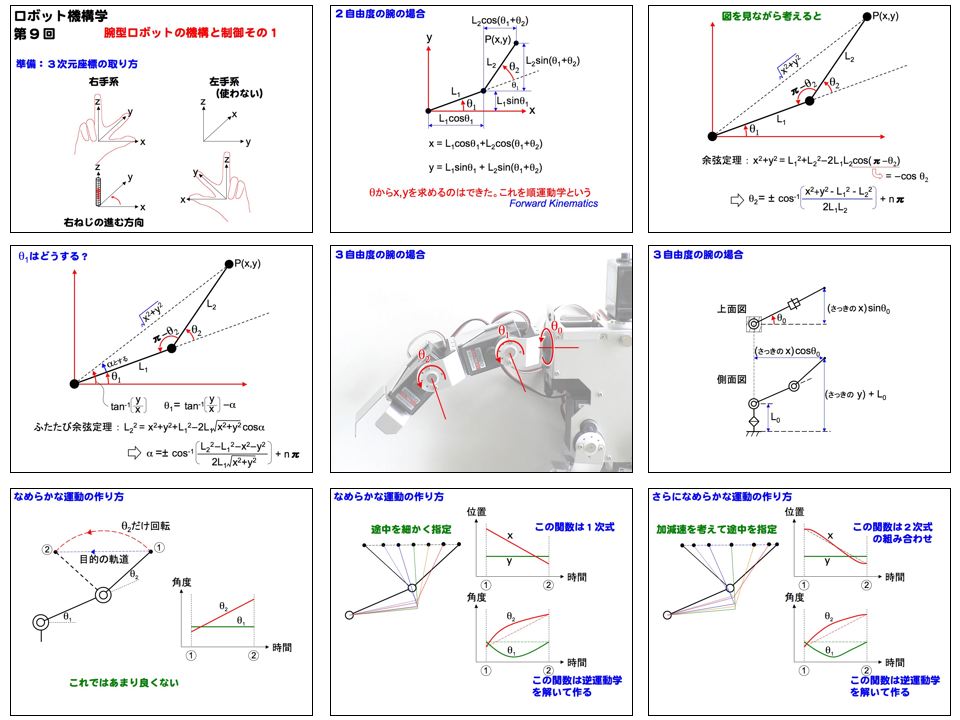
授業中の演習:(1)2関節マニピュレータの関節角度から先端位置を求める。(2)先端位置から関節角度を求める。
宿題:3自由度マニピュレータの構造をできるだけたくさん考える。関節角と先端位置の関係が求められるか考える。
第10回(2007)腕型ロボットの機構と制御その2
配布資料
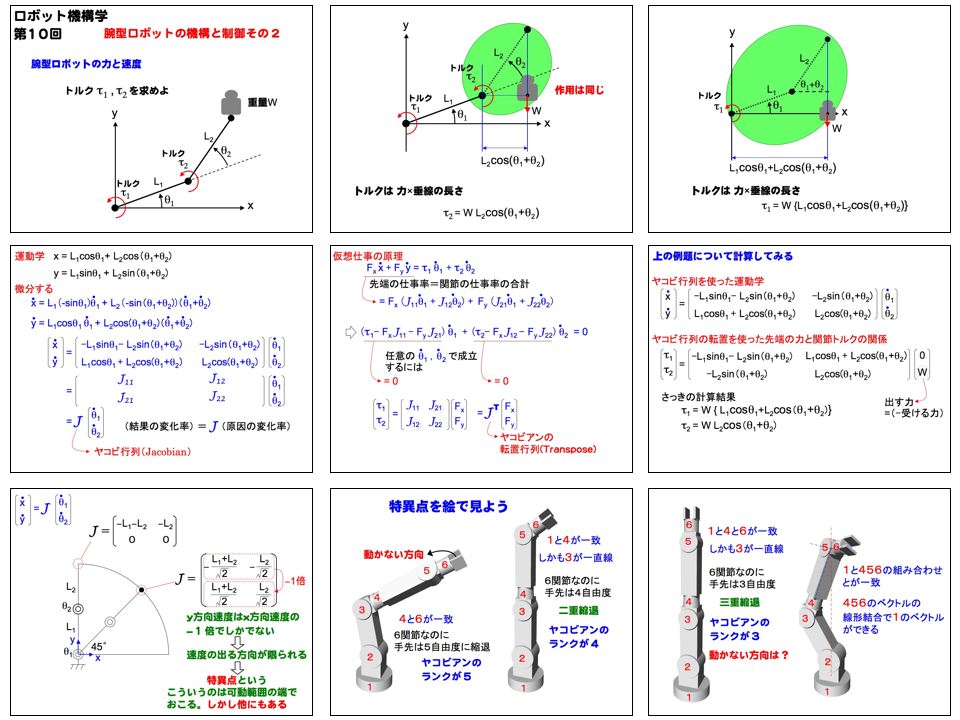
授業中の演習:(1)2関節マニピュレータの先端負荷から関節トルクを求める。
(2)2関節マニピュレータのヤコビアンを具体的に求める。
宿題:2関節マニピュレータの設計:
可動範囲全域で所定の重量のものがあつかえるように関節駆動の減速比を計算する(モータの定格トルク内で)
第11回(2007)脚ロボットの機構
配布資料
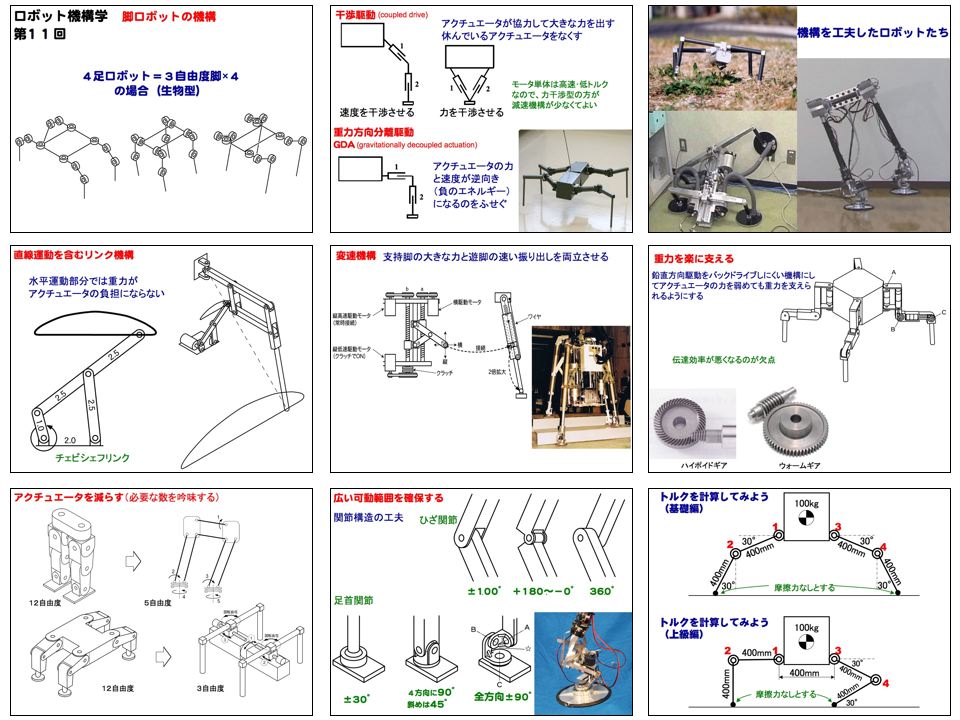
授業中の演習:(1)アクチュエータが3つなのに先端点が3次元空間内を自在に動ける機構と動けない機構
3次元に動ける機構だけれど特異点になる姿勢
(2)脚ロボットの関節トルク計算
宿題:4足歩行のパラパラまんがをつくろう
第12回(2007)脚ロボットの制御
配布資料
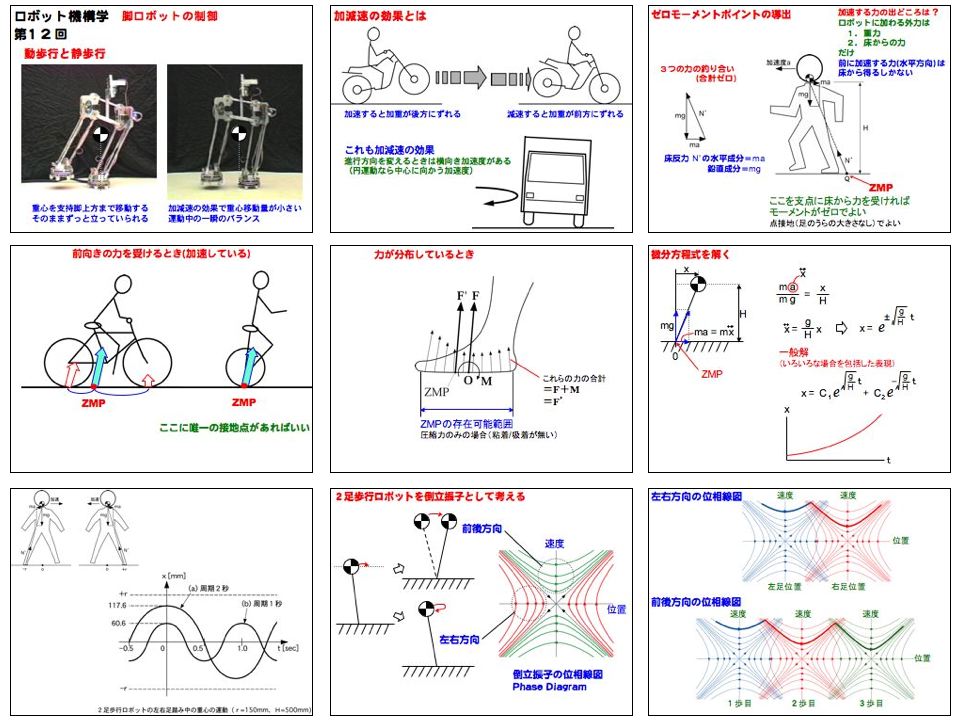
授業中の演習:宇宙ステーションの外部を渡り歩く3本足ロボットの構造を考えよう
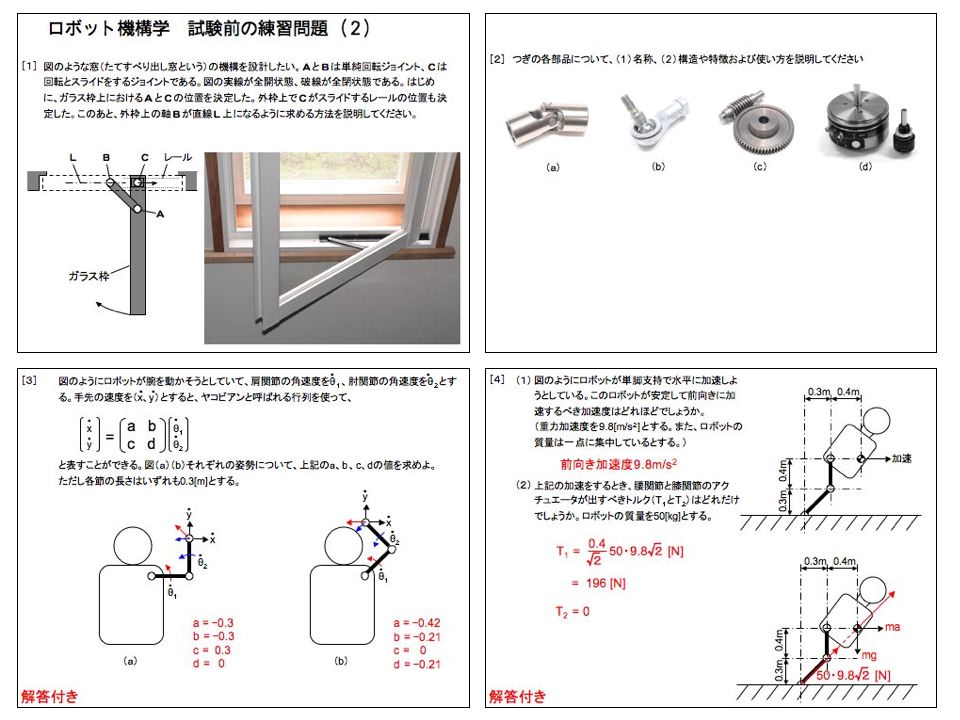
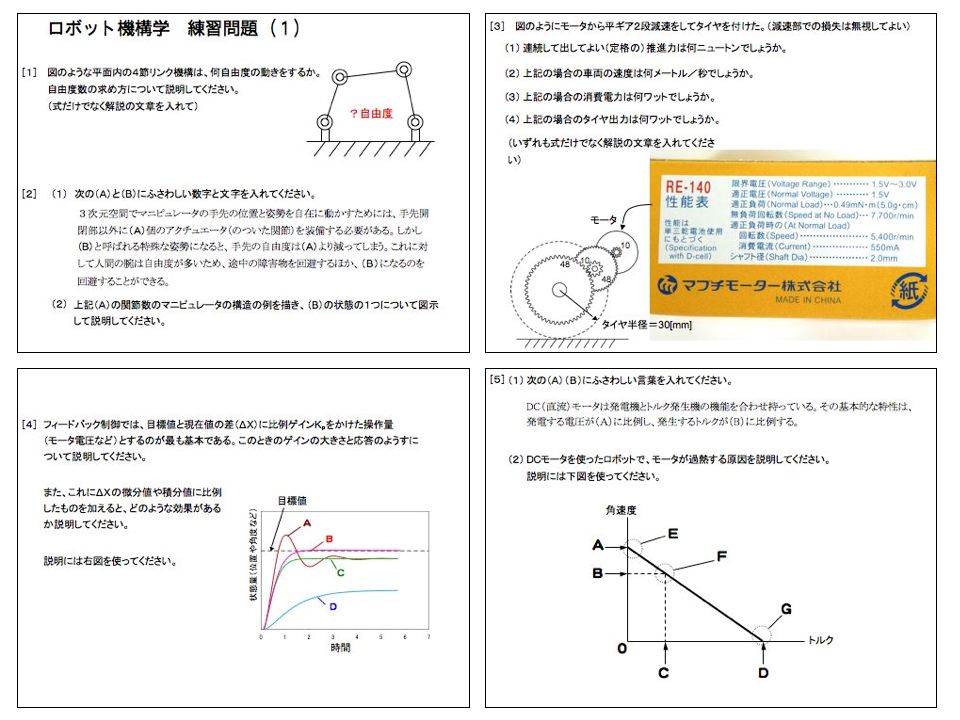
試験前の練習問題その1(2007)
試験前の練習問題その2(2007)