ロボット設計製作論実習3
この講義は未来ロボティクス学科2年次後期に開講します。==>発表会ビデオのページ
未来ロボティクス学科でこれまでに学んだ機構学,機械力学,プログラミング,制御工学,電気電子回路などを駆使して、オリジナルロボットハンドを設計・製作します。
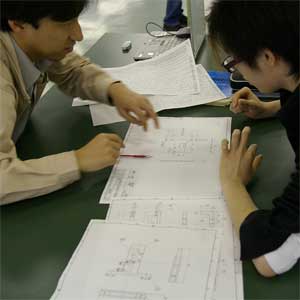
機械設計製図法を学び、ハンドの設計図を描きます。
自分のハンド用だけでなく、他人のハンド用の部品も図面を交換して製作します。おもに旋盤やフライス盤などを使った機械加工を行います。
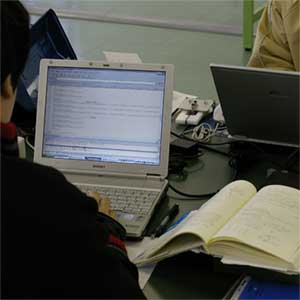
製作したハンドを実習室に用意した市販のマニピュレータに付けて作業をさせるプログラムをつくります。
ハンドの構成やマニピュレーション作業の内容は自由です。各自のオリジナルとします。
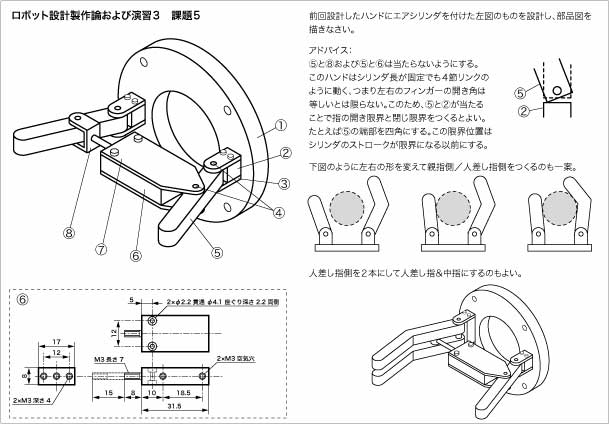
小型のエアシリンダを配布し、これを使用するのを標準とします。
製図の教科書
設計図面のチェック、旋盤・フライス盤を使って工作、マニピュレータの操作練習



教科書を見ながらマニピュレータの運動学を駆使したプログラムを開発
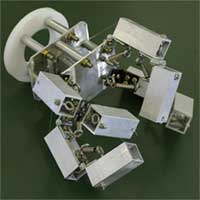
自作ハンド+自作プログラム+市販マニピュレータの組合せでデモンストレーション

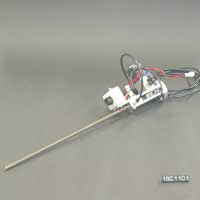
使用するエアシリンダ:

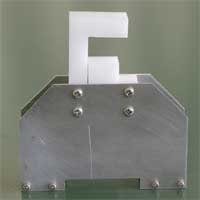
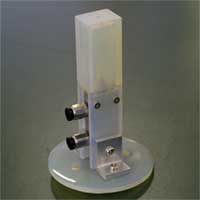
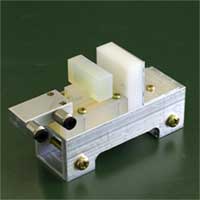
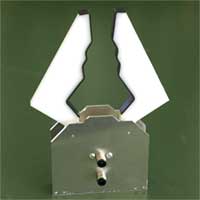
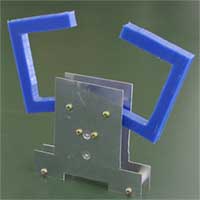
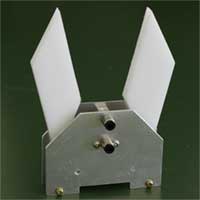
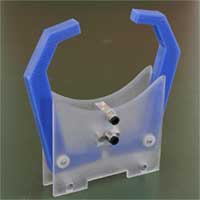
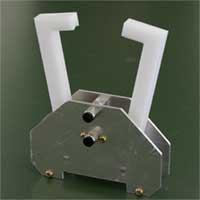
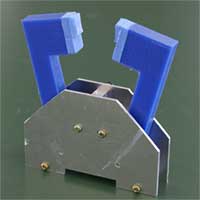
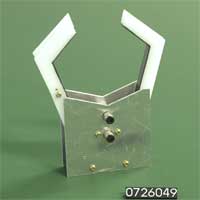
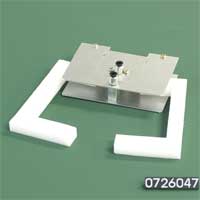
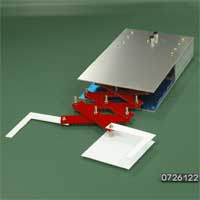
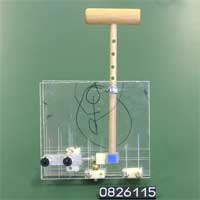
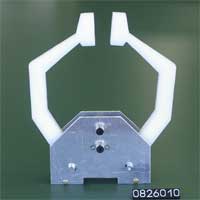
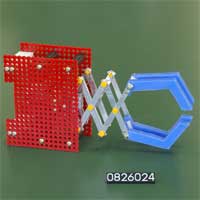
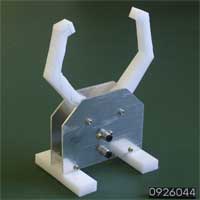
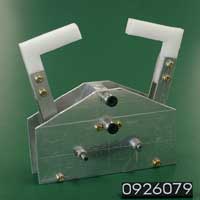
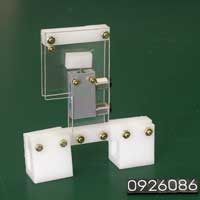
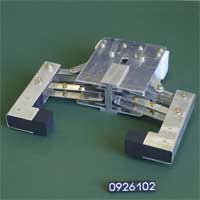
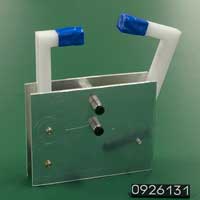
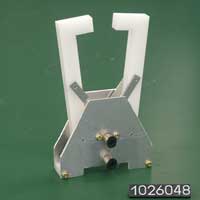
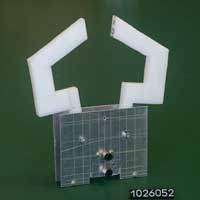
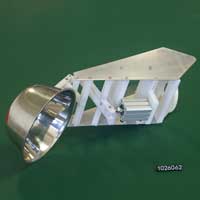
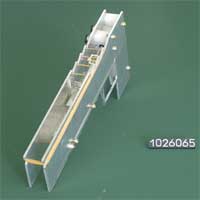
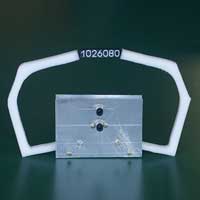
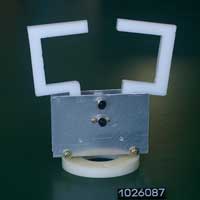
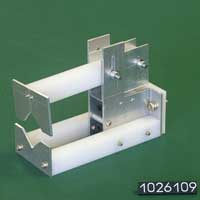
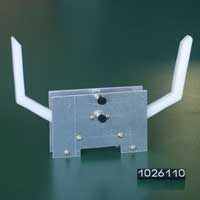
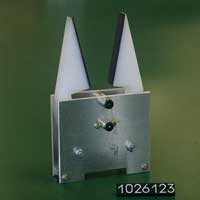
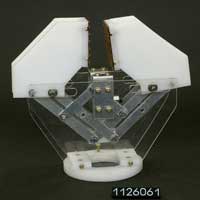
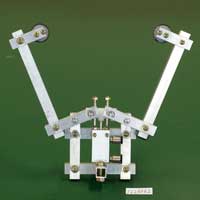
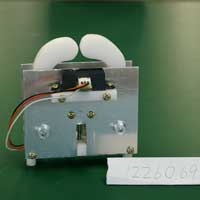
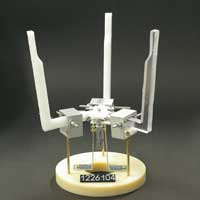
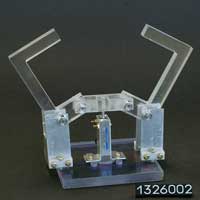
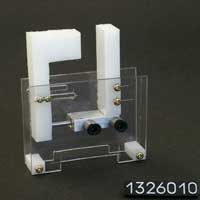
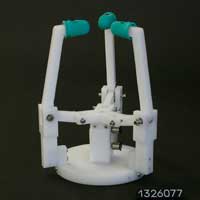
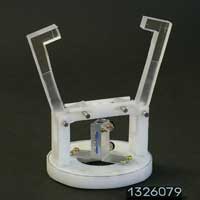
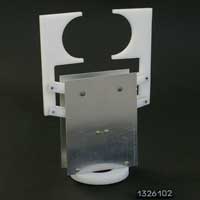
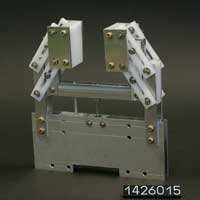
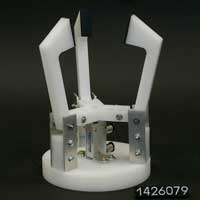
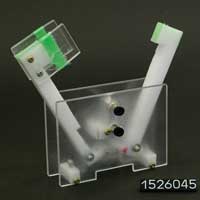
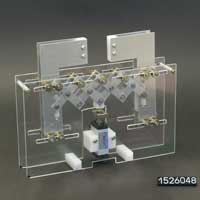
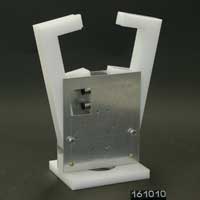
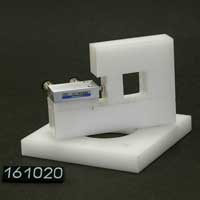
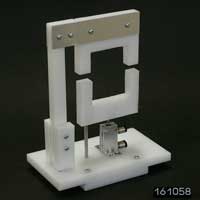
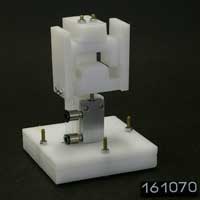
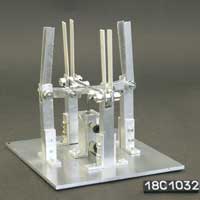
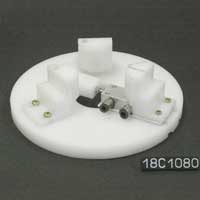
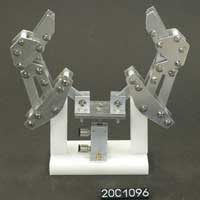
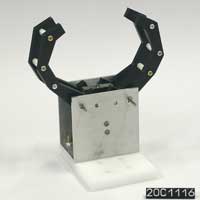
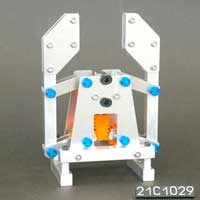
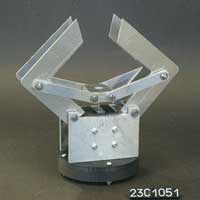
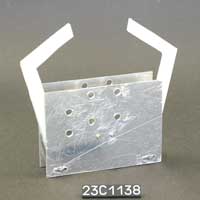
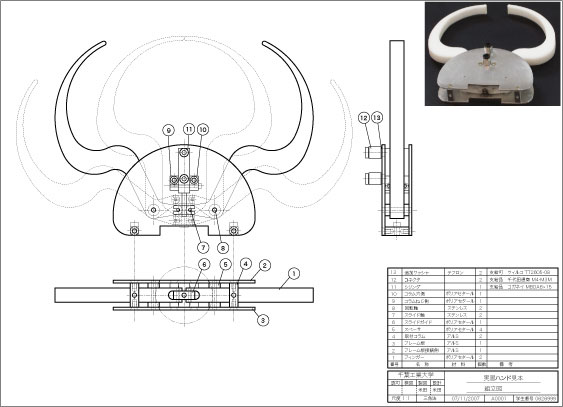
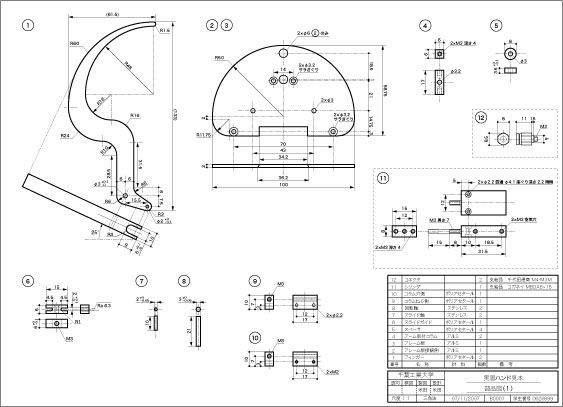
見本のハンドの図面と写真:
製図の練習(これらの練習は、オリジナルハンドの設計・製作と並行して行っています)
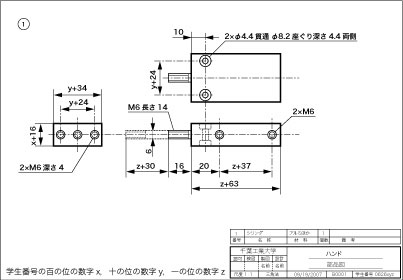
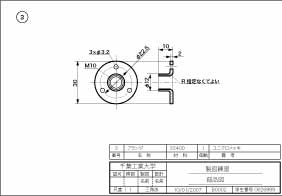
1週目(見本図面のトレース.学生番号による寸法違いあり)
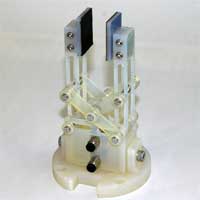
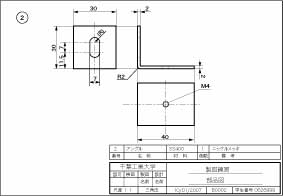
2週目(現物を見ながら3面図を作成)

![]()
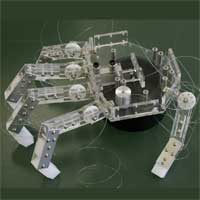
3週目(現物を見ながら断面図を作成)

![]()
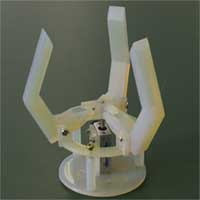
4週目(概略イメージから実際の設計をする練習。部品図を作成)
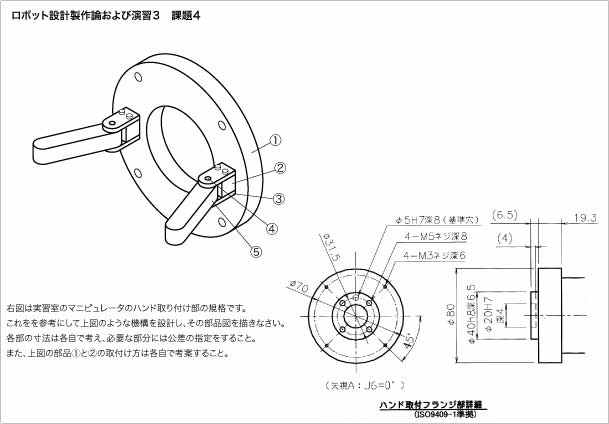
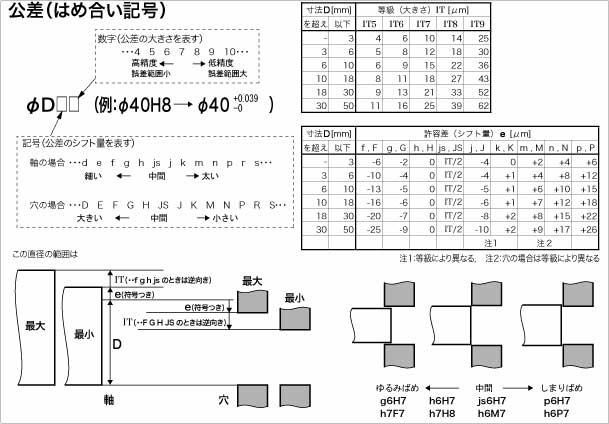
マニピュレータのハンド取り付け部を例に、はめ合い公差の勉強
5週目(エアーシリンダ駆動ハンドの典型モデルを設計・作図)
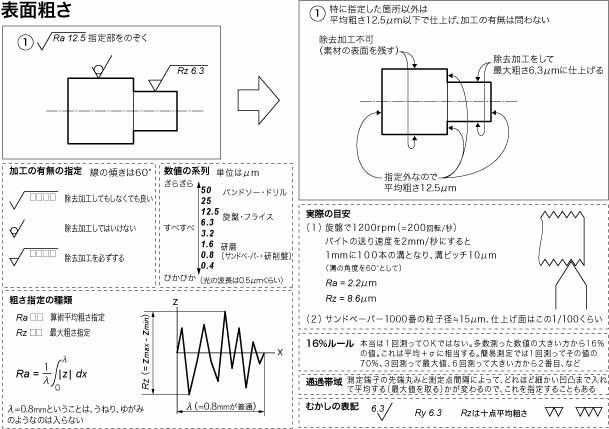
表面粗さ指定方法の勉強。実際の加工法や見た目の感覚と、粗さ数値との対応を知る
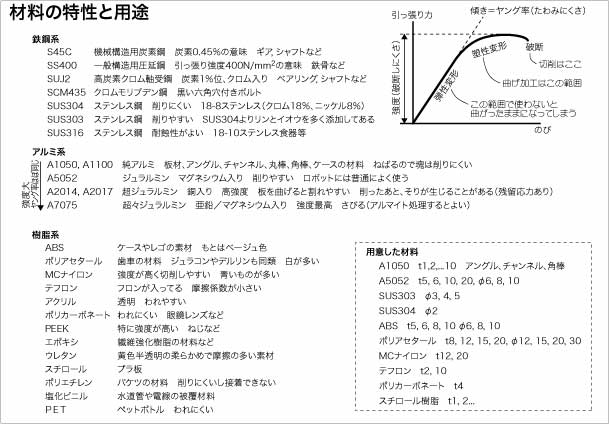
6週目 材料の応力ひずみ特性を学び、適材適所の材料選択ができるようにする
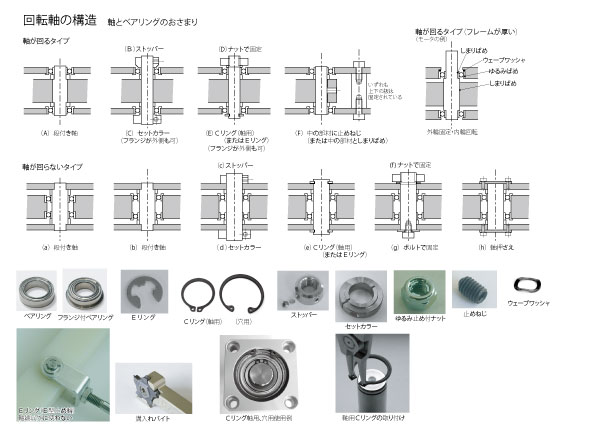
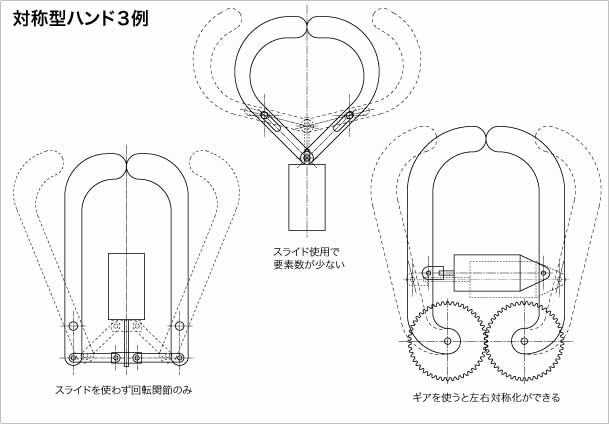
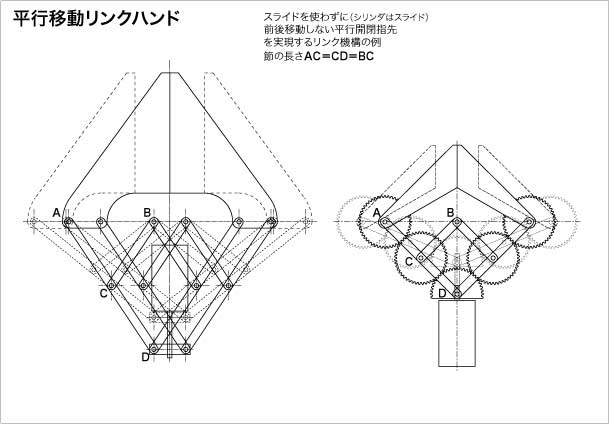
7週目 オリジナルハンド設計の参考に各種機構の例を見る
8週目 ねじをつくる工具と使い方

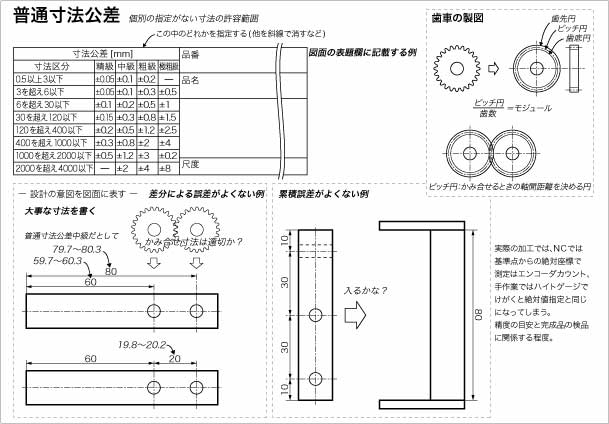
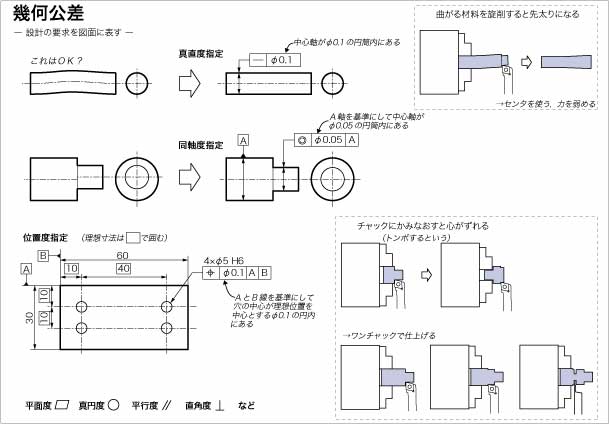
9週目 寸法公差と幾何公差の基本を学ぶ
(同時に、歯車の製図法や旋盤加工のコツも解説)