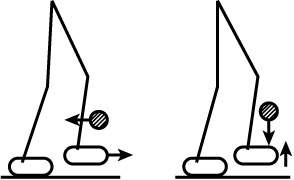
When a weight on the ankle is accelerated backward, it generates a force to make leg forward as shown in Fig.1. Also, a vertical acceleration of the weight can produce up/down forces. Both accelerations are realized by a single weight rotation as Fig.2. The actuator also produces a vertical kicking motion of the foot as in Fig.3 to excite a liftoff motion. A cycle time of actuation is basically constant.
YANBO6R has Arms for additional inertial assist.
With inertial assist of arm, YANBO6R can walk slower than original, which means long term stability is produced.
Crawl-like arm rotation makes rolling moment as well as yawing, which helps to keep body during one leg supporting.
Double speed backward rotation like butterfly swimming produces up/down force as well as longitudinal direction force, which enforces foot lifting by pullup the body, and foot forwarding by pushing the body forward.
Fig.1 Principle of inertial assist
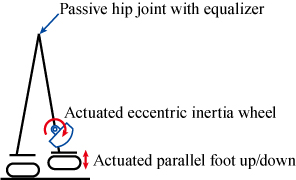
Fig.2 Configuration of YANBO6
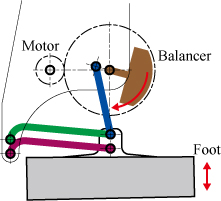
Fig.3 Details of driving system