移動ロボット
人の立ち入れない環境での探索作業を目的として,不整地上を移動するロボットを研究開発しています.
車輪型ロボット
-
全方向移動ロボット「EggBeater」シリーズ
弾性球体車輪を持つ全方向移動体です.弾性球体車輪を構成する超弾性ロッドの摩擦の異方性によって全方向移動を実現します.弾性球体車輪は防塵防水性や耐衝撃性に優れますので,劣悪な環境での使用が可能です.
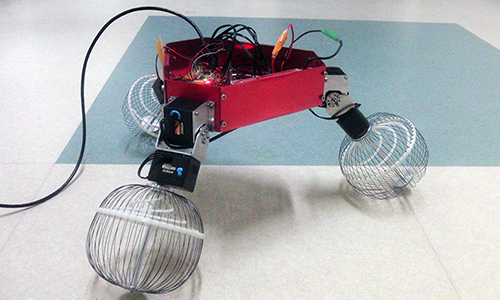
EggBeater 1(全方向移動ロボット,3輪仕様)
-
月面探査ローバ「Tri-Star IV」(~2012)
月面のクレータ内でのサンプル採取を目的として,移動性能の研究を行いました.砂上での優れた移動性能と,転倒状態から後輪アームを回転させて自己復帰できるのが特徴です.
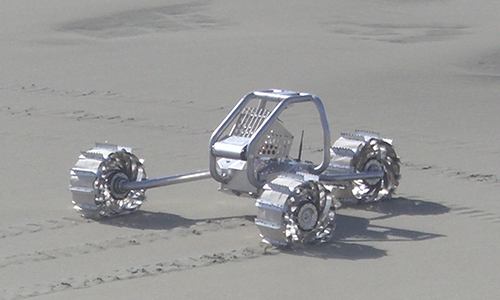
Tri-Star IV(月面探査ローバ)
クローラ型ロボット
-
柔軟変形クローラ「SCV」シリーズ
クローラベルトが柔軟に伸縮変形を繰り返して走行します.クローラ型でありながら内部を完全気密にできるのが特徴です.

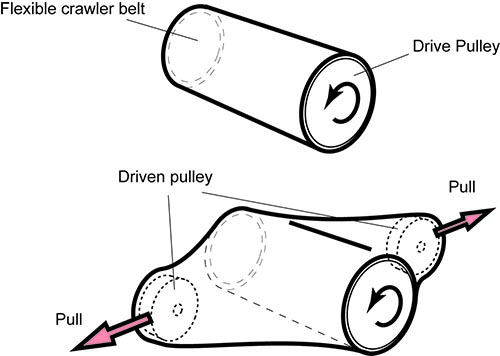
SCV 1(柔軟変形クローラ)
-
多機能フリッパーアームを持つクローラ型ロボット「Alacran」シリーズ
フリッパーアームに複数の機能を持たせたクローラ型ロボットです.地形によって走行形態を変えます.
Alacran 3(クローラ型ロボット)
脚型ロボット
-
球体外殻を持つ脚型移動ロボット「QRoSS」シリーズ
球体外殻には耐衝撃性があり,着地後に格納した脚を展開して歩行ロボットへ変形します.転倒しても球体外殻を利用して起き上がります.
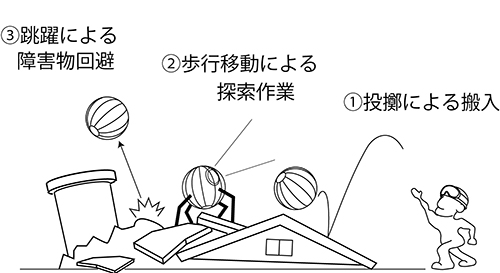
QRoSSコンセプト
-
QRoSS II
平地では球体外殻を利用した回転移動が可能です.
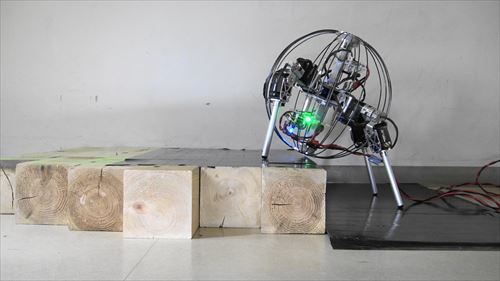
QRoSS II(球体外殻を持つ脚型ロボット)
脚車輪型ロボット
-
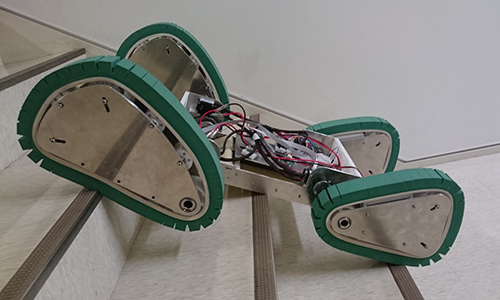
脚車輪型移動ロボット「Kelios」シリーズ
平地での車輪の高速移動能力と,不整地上での脚の対地適応能力を両立した移動ロボットです.車輪を接地点として利用すると歩行による移動ができます.
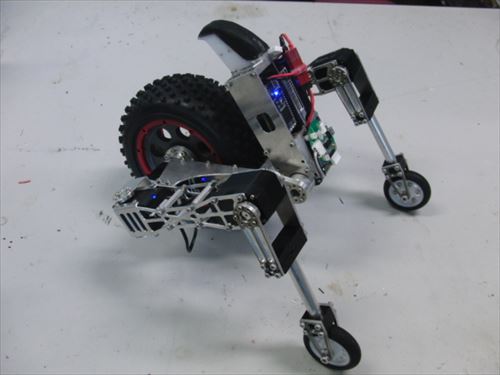
Kelios I(脚車輪型移動ロボット)
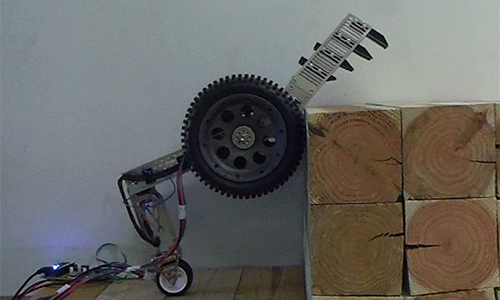
Kelios II(脚車輪型移動ロボット)