ソフトロボット
柔軟に変形を繰り返しながら移動するロボットを開発しています.構成部材の製造装置の研究もしています.
粉粒体を用いた柔軟変形移動体
-
柔軟変形移動体「Paramecium」
全体を包むバッグの形状を内部の核から張った複数本のワイヤで制御します.また常に膨張する空圧とは異なり,粉粒体を使用することで不必要な膨張を防ぎます.軽量な粉粒体としてピンポン玉を使用しています.

Paramecium
板状柔軟変形移動体
-
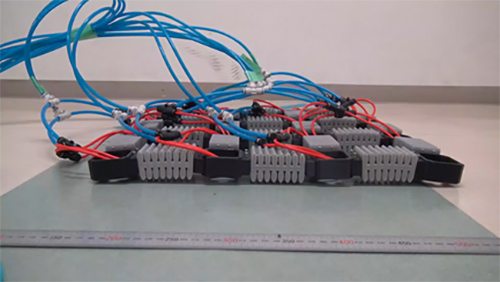
板状柔軟変形移動体
空圧駆動によって2方向へ屈曲するアクチュエータを井桁状に組み合わせて2次元平面を構成します.連続的な進行波を生成して移動します.
板状柔軟変形移動体