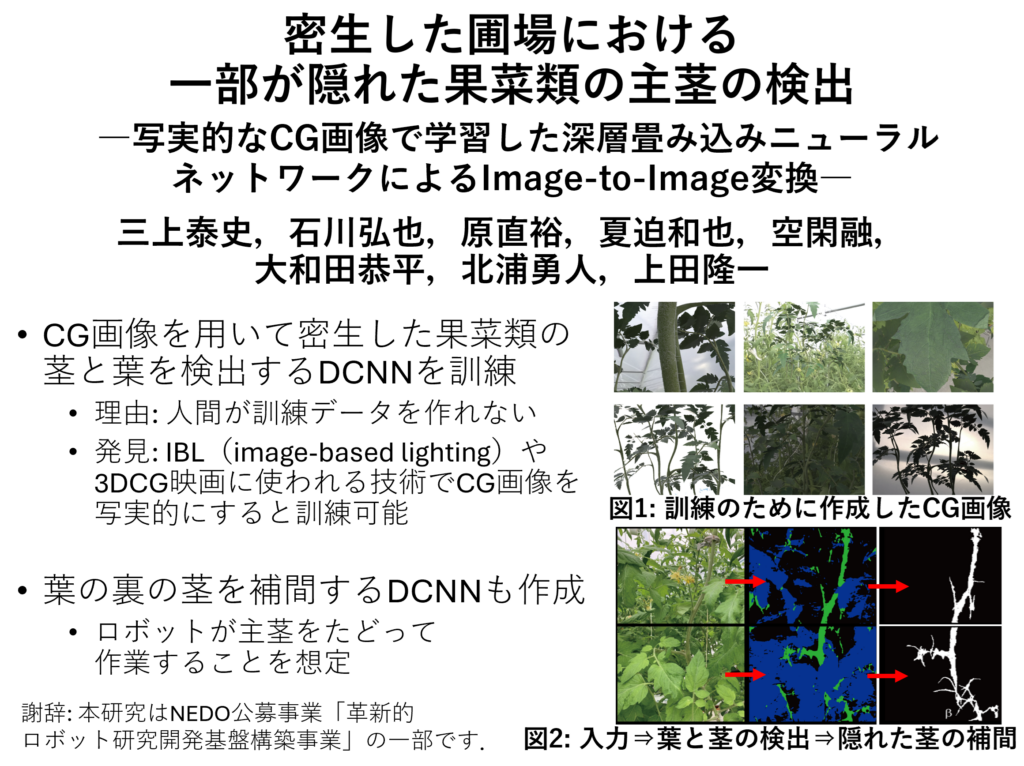
2022年に日本ロボット学会誌に掲載された上田研からの論文が、日本ロボット学会第38回学会誌論文賞に選ばれました。ヤンマーホールディングス株式会社さんとの共同研究でした。(現在は契約期間が終了しています。)
内容については上田研究室のページのとおりで、畑に植わっている葉や茎の茂った作物の木から、葉・茎・背景を識別し、さらに葉に隠れた茎がどこにあるか推定して見えている茎とつなぐというものです。この分野は進歩が早いのですが、当時はリアルに作ったコンピューターグラフィックを使って識別器(一般にはAIと呼ばれるものの一種)を学習させ、ほぼ緑色の画像から葉や茎を検出できるようにしたことが画期的でした。上田は理屈は分かるもののCGも深層ニューラルネットワークも直接扱ったことがないんですが、当時の学生さんにいろいろ無理をお願いして、なんとか形にできました。


表彰式の後は懇親会があり、上田はビールを飲みすぎましたがそんなことはどうでもよく、とにかく共著者のみなさま、契約関係や特許関係でいろいろ面倒を見ていただいた事務方のみなさま、候補の論文をグエーと言いながらたくさん読んだ表彰委員の皆様、たいへんありがとうございました。