
2024年5月29日(水)~6月1日(土)にライトキューブ宇都宮で開催された日本機械学会ロボティクス・メカトロニクス講演会2024において,未来ロボティクス学科・専攻の学生・教員が合計26件の発表を行いました.
当日は全国から多くのロボット研究者が集まり,熱心な議論が交わされました.
発表タイトル
・4足歩行ロボットの慣性安定制御
・受動歩行原理を用いた動歩行二足ロボットの開発
・ベルトに直交方向の異方性摩擦がある素材を用いたクローラ型全方位移動ロボット
・斜めのグローサで不整地を横移動するクローラロボットの開発
・スタック防止形状を有する泥濘地移動クローラロボットの開発
・LiDAR による自己位置推定が破綻した際のGNSS 測位可能な場所への自律移動ロボットの誘導
・造形温度・ノズルの違いによる3D プリント造形物の強度変化
・カラーカメラベースの自己位置推定におけるCNN を用いた推定の信頼度評価法の適用
・視覚と行動のend-to-end 学習により経路追従行動をオンラインで模倣する手法の提案
・中干し後の水田除草用ヘビ型ロボットの開発
・水面付近におけるトビウオの滑空特性の解明
・トビウオのタキシング時における尾鰭捻りの力学特性の解明
・翼端の運動軌跡に基づく空力特性の解明
・水田除草用ヘビ型ロボットの開発
・コンクリート壁面の鉄筋探査を行うブロア式壁面走行ロボットの開発
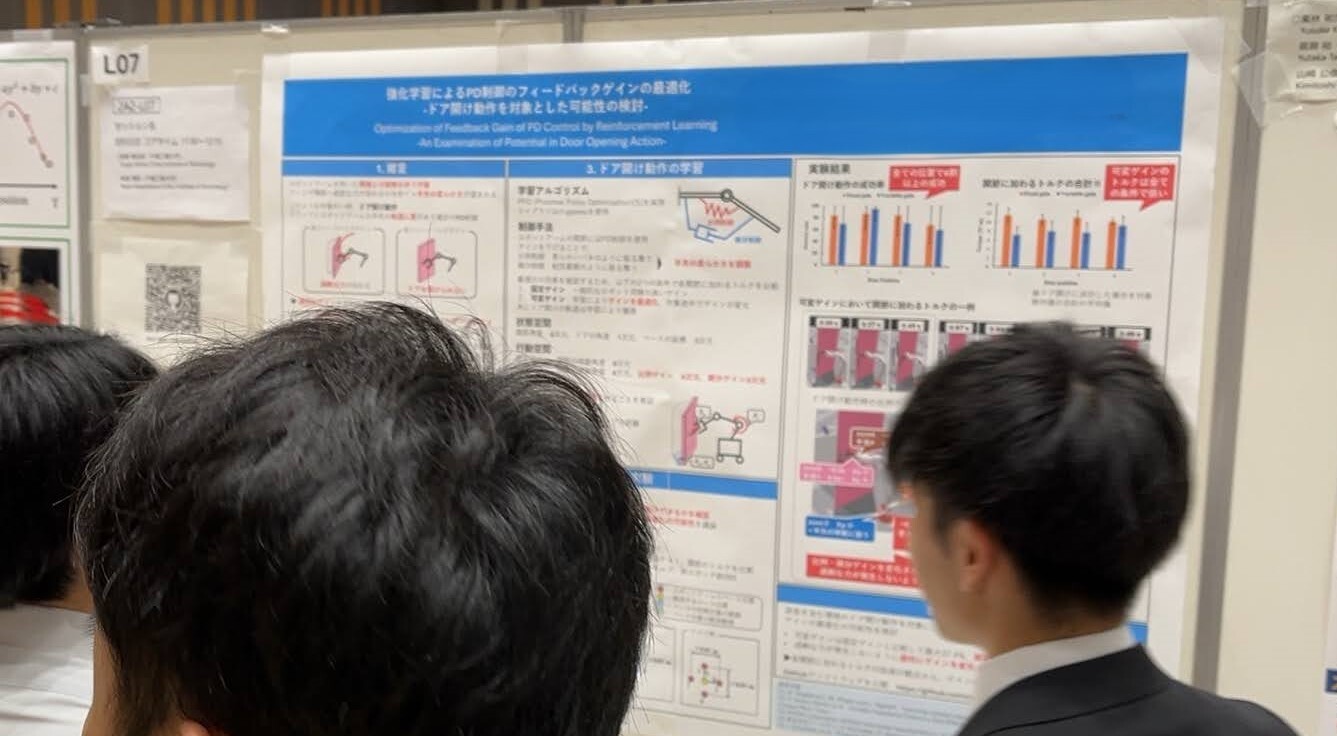
・強化学習によるPD 制御のフィードバックゲインの最適化
・トンネル天井走行ロボットの開発
・4つのアルキメディアンスクリューを用いた不整地走行ロボットの開発
・方向可変な車輪を有する8 輪運搬ロボットの開発
・ワイヤーを用いた周長可変式柱検査ロボットの開発
・サイドワインディング推進を目的とした省自由度ヘビ型ロボットの開発
・省自由度蛇型ロボットの移動軌跡の最適化
・クモヒトデを規範とした全方向移動ロボットの開発
・変形量を拡大した連結可能な空圧屈曲モジュールの開発
・マルチエージェント強化学習によるサッカーヒューマノイドロボットの協調動作生成
物理シミュレーション環境を用いた学習の高速化
・SUSTAINA-OP™: 持続可能性を重視した子供サイズの オープン ハードウェア プラットフォーム ヒューマノイド ロボット