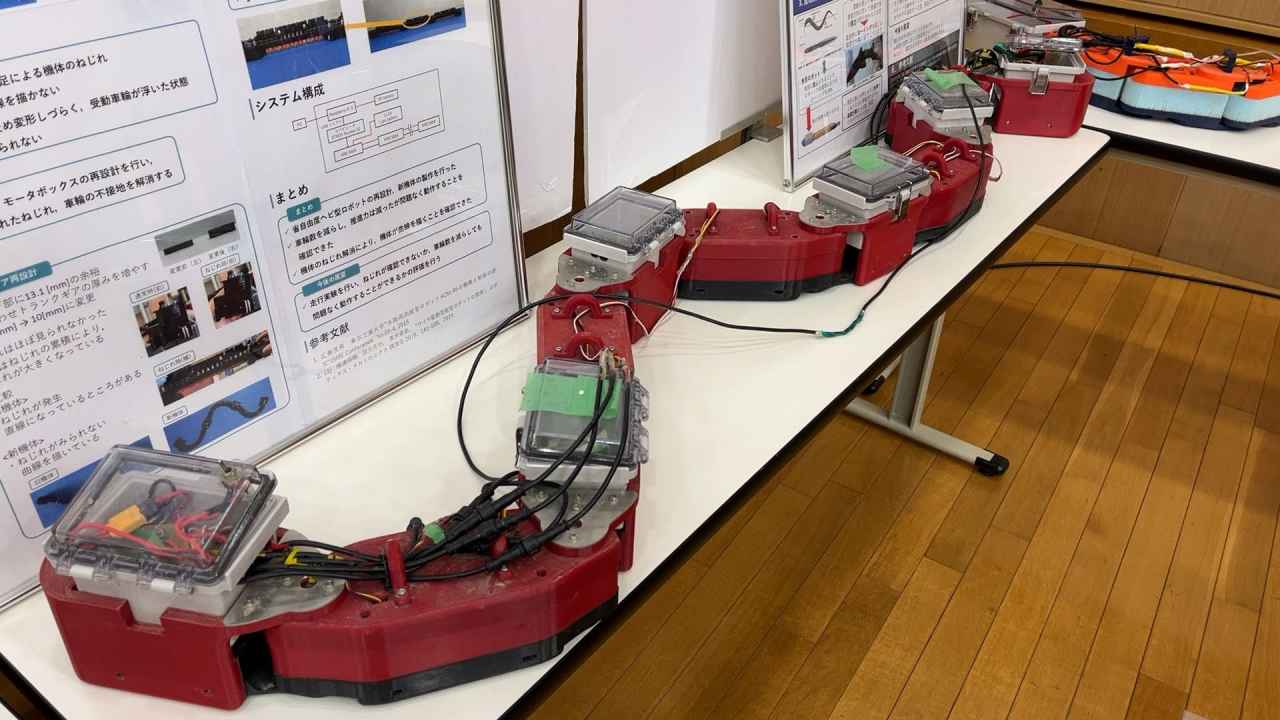
田植えの季節になりました.青木研では土曜から水田除草ヘビロボットの実験を開始しました.
万全の準備で今年は順調!

土を巻き上げながら移動することで地面の光を遮断し,雑草の育成を妨ぎます.

順調!と思いきや転覆.レスキューしました.

実験は続きます.

千葉工業大学先進工学部未来ロボティクス学科 / 大学院工学研究科未来ロボティクス専攻

田植えの季節になりました.青木研では土曜から水田除草ヘビロボットの実験を開始しました.
万全の準備で今年は順調!
土を巻き上げながら移動することで地面の光を遮断し,雑草の育成を妨ぎます.
順調!と思いきや転覆.レスキューしました.
実験は続きます.

令和7年12月7日(日)につくば市で開催された屋外自律移動ロボットのチャレンジである「つくばチャレンジ」に,未来ロボティクス学科のチームが8チーム参加しました.
自律移動の最長距離は1.791kmであり,この間,ロボット自身が自律的に自己位置を推定し,指定された経路に沿って市街地を走行します.
スタートの指令以外は,人が一切手を触れてはいけないという厳格なルールのもとで,長距離を走行することが求められます.
千葉工業大学のチームには,研究の一環として参加しているものが多く,例えば,
・模倣学習をベースに,画像情報のみを用いて自律走行を行う
・地図の圧縮方法や経路探索手法に,現在研究中の最先端アルゴリズムを用いる
といった挑戦に取り組んでいます.
現在,自動運転技術などが注目されるなかで,未来ロボティクス学科では,市街地を自律的に移動できるロボットの開発に,2008年から取り組んでいます.



11/10,11にかけて、松本工業高校電気科2年生12名+引率教員が高大連携授業のために来校されました。津田沼キャンパスにて、現代制御の勉強(シミュレータや実機実習含む)やAIに関する勉強、研究室見学などをおこないました。


2025年夏,日本設計工学会の国際会議ICDES2025(The 6th International Conference on Design Engineering and Science)で研究発表すべく,菊池研の修士軍団がエジプトのアレクサンドリアに行ってきました.ここは地中海に面した歴史ある小さな港町です.
出発前,学会発表が初めての学生の他,海外が初めてもおり,食事が合わなかったらどうしようということで,日本にひとつしかないというエジプト料理コシャリの専門店で予習.が,これ無理です,という学生が現れ,カップラーメンをスーツケースいっぱいに持っていくことに(あんなにも親切にマスターが食べ方を説明してくれたのに...).そして,海外用SIMカード,google翻訳の日本語→アラビア語,現地用変圧器,PCバッテリー,あつい研究魂,いろいろ用意していざ空港へ.
空港に着いたら,一緒に学会に参加する他大のグループと合流,ごあいさつ.一日一便しかないのでみんな同じ便.心強い.と思ったら既に体調不良の学生がどんよりした顔.大阪万博に行ってきたとか.なぜ,このタイトスケジュールで行く!?.初手から厳しい.とりあえず,しばらく日本食が食べられなくなるので,元気な学生と牛丼へ.ラーメンにも後ろ髪をひかれつつ出発.真っ暗闇の中,眼下に広がる羽田のあかりを後にしました.
トラブルやらなんやらで乗り換えのカタール・ドーハで8時間足止めされつつも,アレクサンドリアに到着.ホスト大学のエジプト日本科学技術大学(E-JUST)の皆様がお出迎え.超安全にホテルへ(ありがとうございます!).さすがにサハラの夏は暑いかと思いきや,体感は明らかに千葉の方が暑い...で,まずは携帯を現地仕様に,と思ったらSIMカードが認識されず学生の携帯にテザリング(なぜだ!).一方,硬水が苦手な学生は着いたとたんに軟水探索の旅へ.最終的には,成分表を見ただけで軟水かどうかわかるように...そんなこんなで現地到着初日は暮れていきました.
大会初日はレジストレーションの日.登録だけ済ませて大人は飲みへ.イスラムはお酒飲めないとのことで日本人だけでちゃっかり前夜祭.学生たちは観光へ.アレクサンドリアは地中海の海岸線がとても美しい.海も空も青,青.絵葉書の世界です.しばし仕事を忘れる.
二日目いよいよ新アレクサンドリア図書館で会議.両国の国歌で開会セレモニーが始まりました.ロボット工学の重鎮,F先生が副学長をされているとのことでご挨拶.お変わりないバイタリティーに圧倒されました.E-JUSTは日本の教育システムを採用しているとのこと.つづくキーノートスピーチも大変興味深く,勉強になりました.アフリカで最大のクリーンルームをお持ちだとか.その後セッション,図書館見学会,そして地中海に沈む夕日を見ながらウェルカムパーティー,カイトベイ要塞へ.
三日目はE-JUSTに移動して開催.発表がある学生たちは我に返り,準備へ.なんやかんやであうあうしながらもなんとかみんな発表.英語の大切さを再確認.質問してくれた方々とも仲良くなれました.そして,ご支援いただいた共同研究企業にも感謝.なんとか大役を果たしました.これでアフリカからも発注来るはずです!JICAの教育システム支援の話もためになりました.教育の輸出も大切ですね.夜はプレッシャーから解放されてガラディナーへ.2時間延々踊り続けるお国柄.あ!,Best Paper Award Ceremonyの時間がない!
最終日は朝6時にホテルをチェックアウトしてカイロへ.ゆっくり博物館を見学して,ピラミットの前でフェアウェルランチ(ここで来たか,コシャリ!).Best Paper Award Ceremonyもやっと開催.受賞者の皆様,おめでとうございます!副賞の楯は石のため重すぎて現地に持ち込めないとか.でも,エジプトにちなんでヒエログリフですね.そして長かった旅も終わり,カイロ国際空港,懐かしの日本へ.と,ここで「バサボルト,プリーズ」.あっ,パスポートか,エジプトはPの発音ないんだった.最後の最後でエジプト入門コースに引っ掛かりました...
ありがとうエジプト,ありがとうアレクサンドリア.次回は,仕事ぬきで来ます!


未来ロボティクス学科では3年生で研究室に配属されます。最初から卒論に向けて研究したり(早い場合は学会デビューしたり)、研究は4年からにして自分の作りたいものを作ったりと、比較的自由な1年を過ごします。講義がないわけではないので自由かどうかは審議ですが。
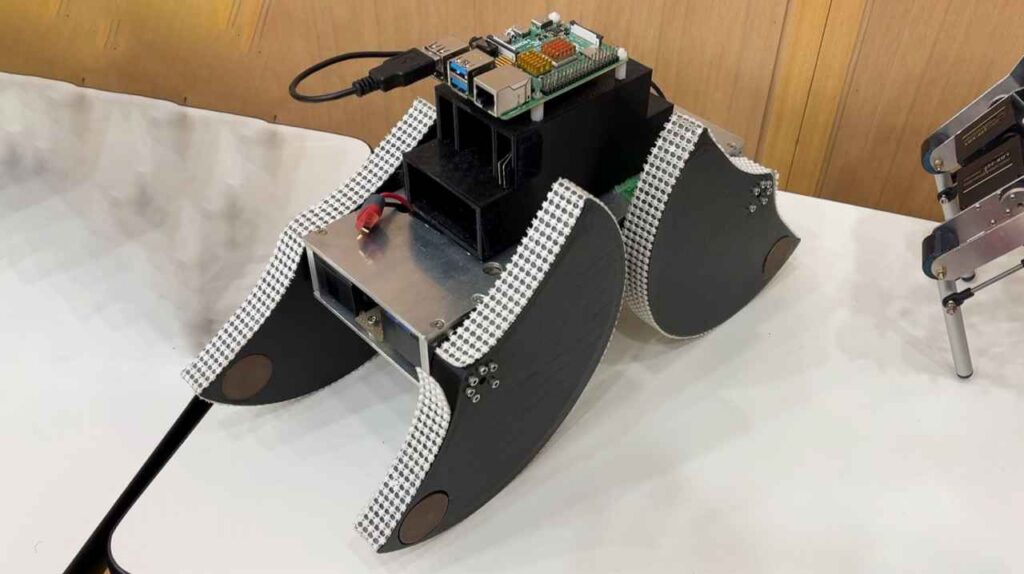
で、少し前になりますが1月に成果の発表会がありました(違う会ですが雰囲気はこんな感じ)。そこにいたのがヘッダの写真のロボットでした。おもしろいのでツイートしたところ、95万回再生されました。学科の宣伝に貢献していただき大変ありがとうございます。
このロボットは学科3年生、米田研究室の佐藤令崇さんが作成、飼育しているもので、中に円盤が入っており、それを回転することで前進、後退する力を生み出しています。佐藤さんは元々スターウォーズなどのSF映画に登場する球体のロボットが好きで、このロボットについては、オーバーウォッチというゲームに登場する「レッキングボール」という球体のロボットを操縦するキャラクターが好きで、そこに影響を受けたそうです(おっさんにはわからん)。球体で作るのは難しく、最終的には楕円形になったそうです。
円盤を回すという機構に関しては球体ロボットを作ると決めてから考えたことで、どこから着想を得たかとかは特にないそうです。強いて言うならリアクションホイールの倒立振子だそうです。
出力をあげていったら一度破裂したのですが、現在はちょっと白くなって元気だそうです。ねとらぼさんにもとりあげられました。
ということで、こういうのを研究室の金で作りたい(←言い方が悪い)という人がいたら、ぜひ本学当学科をご紹介ください。もれなく黒いラグビーボールが轟音をたててお礼参りに伺います。嘘です。
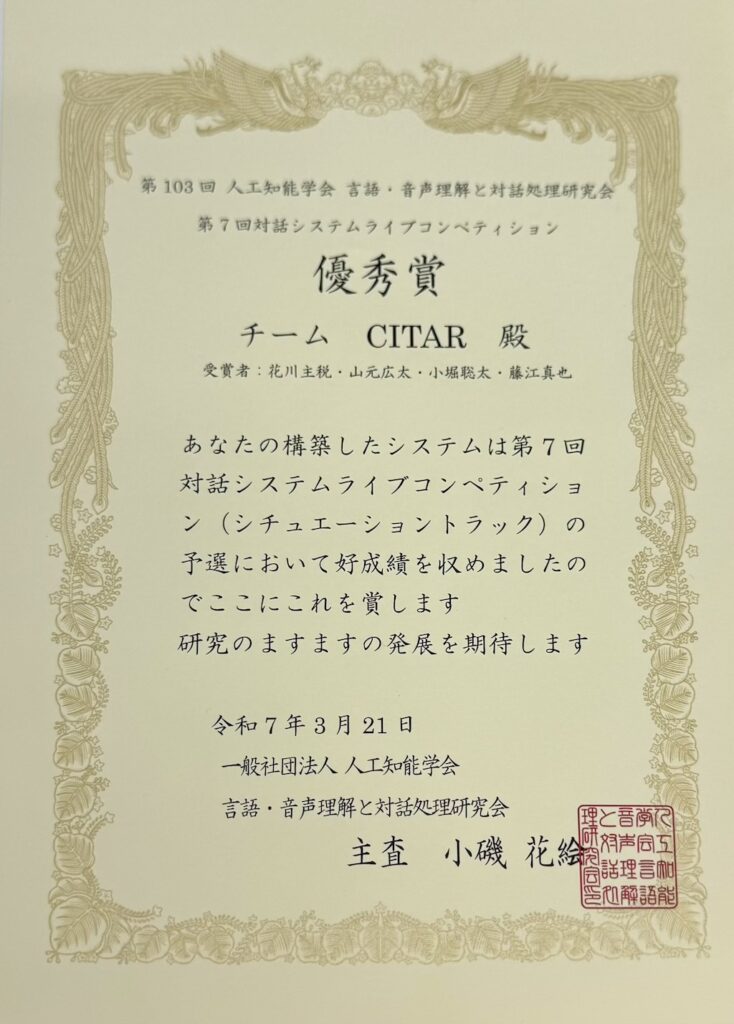
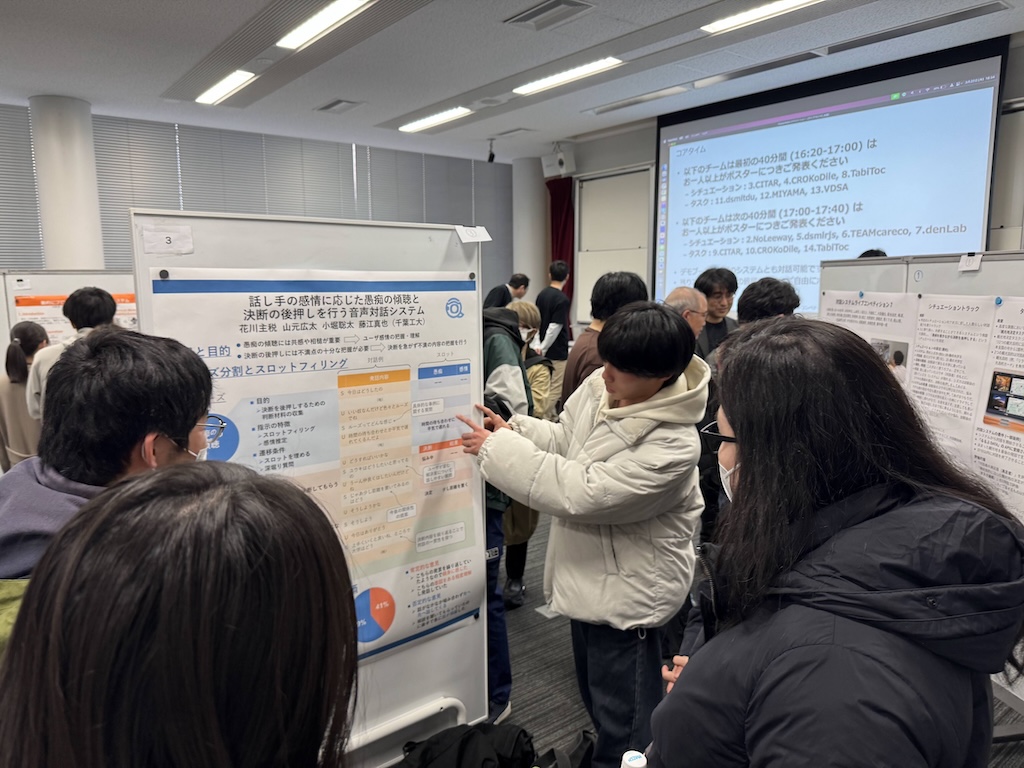
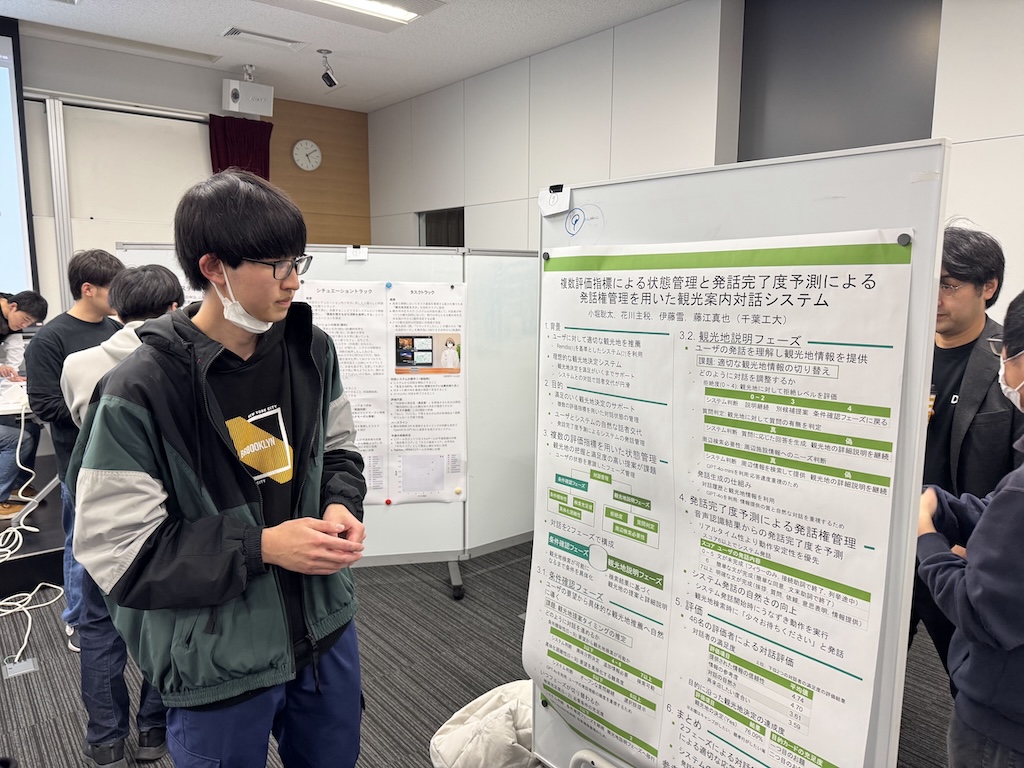
人工知能学会 言語・音声理解と対話処理研究会(SIG-SLUD)で開催された対話システムライブコンペティションで未来ロボティクス学科 藤江研究室のチームが優秀賞を受賞しました.
対話システムライブコンペティションとは,オーディエンスの前で実際に対話システムを動作させ,評価を行うイベントです.対話システムに関するコンペティションはいくつか開催されていますが,このコンペティションは実システムとユーザとの会話をその場で評価されることで競い合う,ライブ感を大切としていることに特徴があります.今回実施されたコンペティションでは,愚痴を聞く対話システムを構築するシチュエーショントラックと,観光地案内を行う対話システムを構築するタスクトラックの2つのトラックが設定されました.
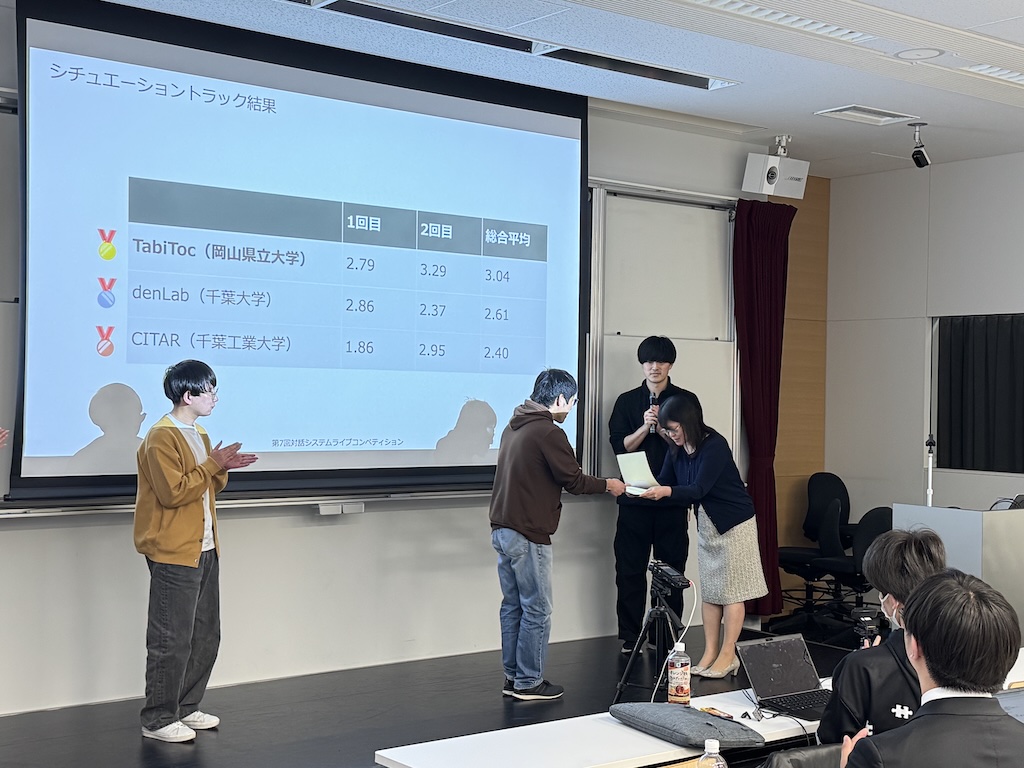
藤江研究室の学生で構成されるチームCITAR(Chiba Institute of Technology, Advanced Roboticsの略)は,今回シチュエーショントラック,タスクトラックの両方にエントリーしました.シチュエーショントラックで予選3位となり通過,タスクトラックは予選4位となり惜しくも予選敗退となりました.3月21日に行われたシチュエーショントラック決勝においても第3位となり優秀賞を受賞しました.また,同時に開催された研究会において,提出したシステムに関する研究発表を行いました.
2025年2月19日(水)に津田沼キャンパス2号館3F大教室で未来ロボティクスフォーラムが開催されました.
当日は多くの教員・学生が参加して,各研究室の研究内容を紹介しました.
大学3年生の優秀発表者の表彰も行われました.
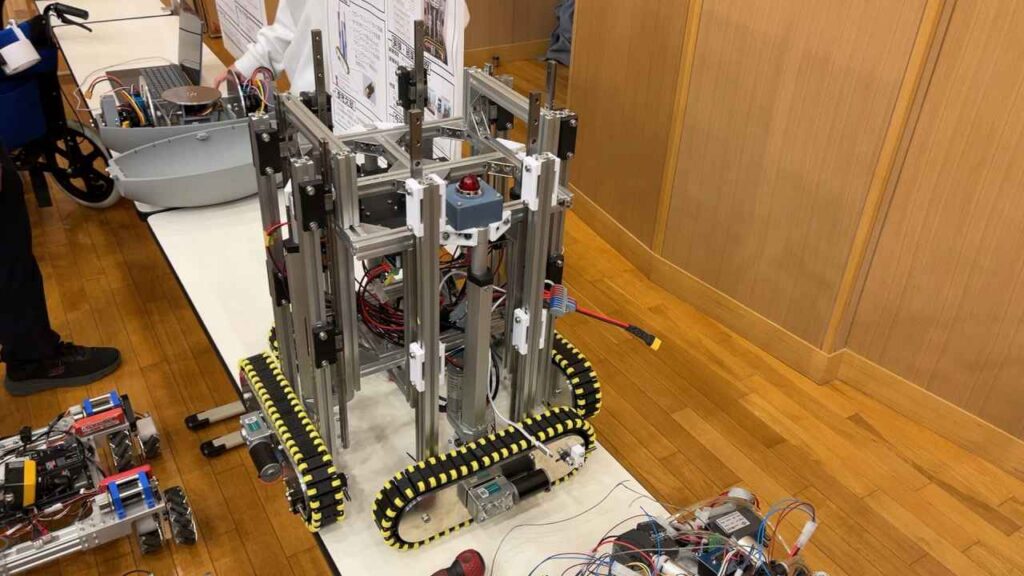
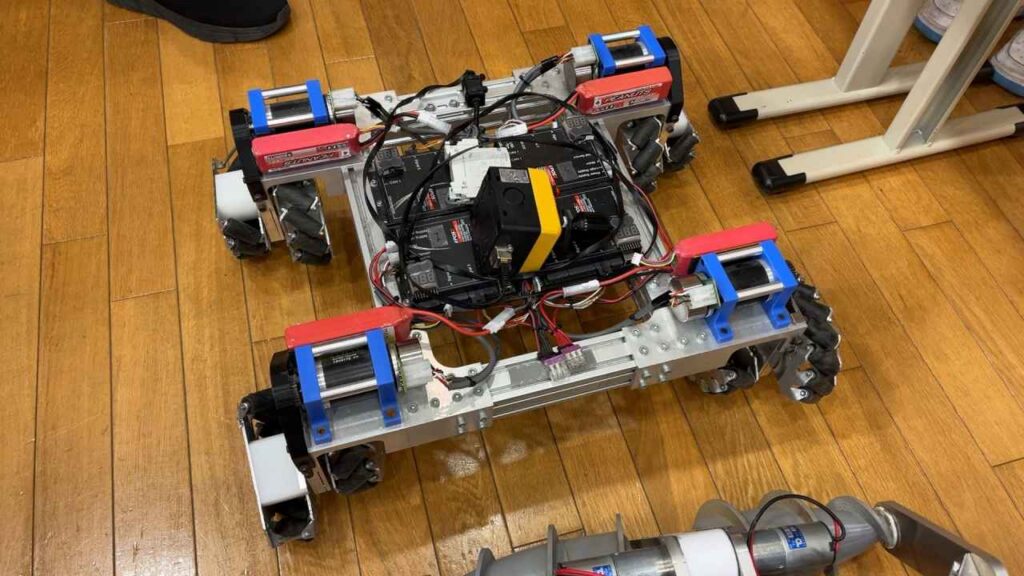
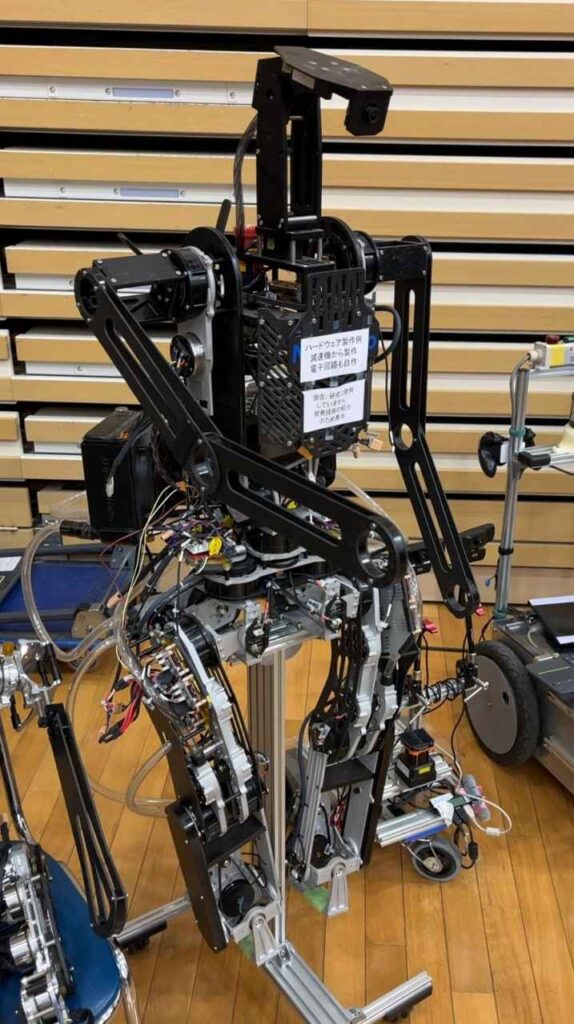
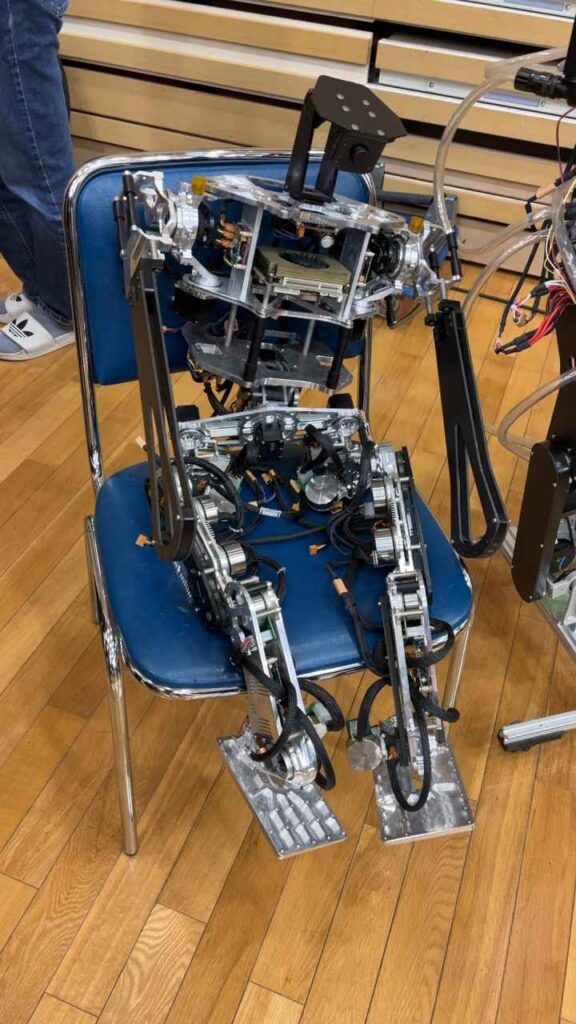
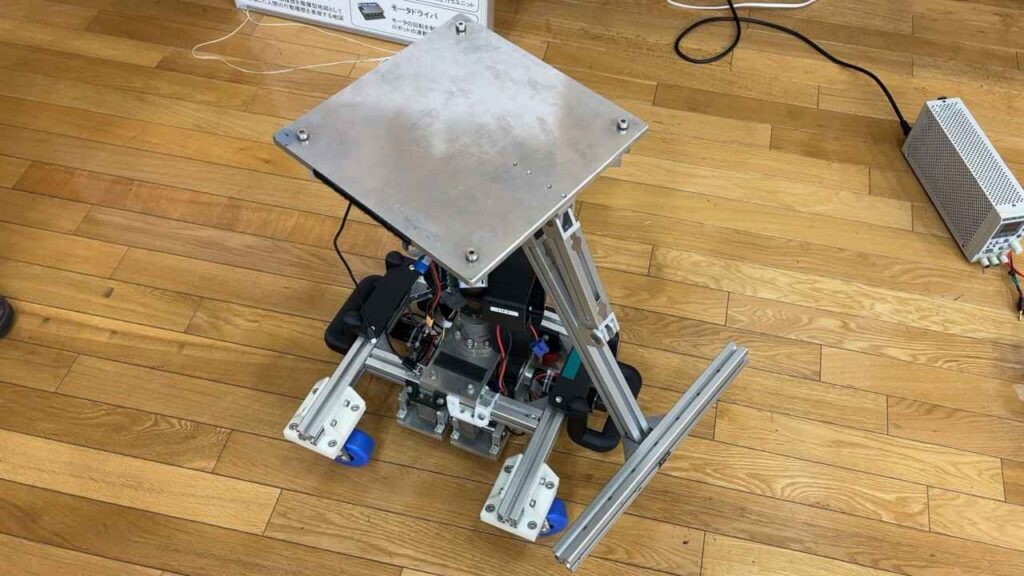
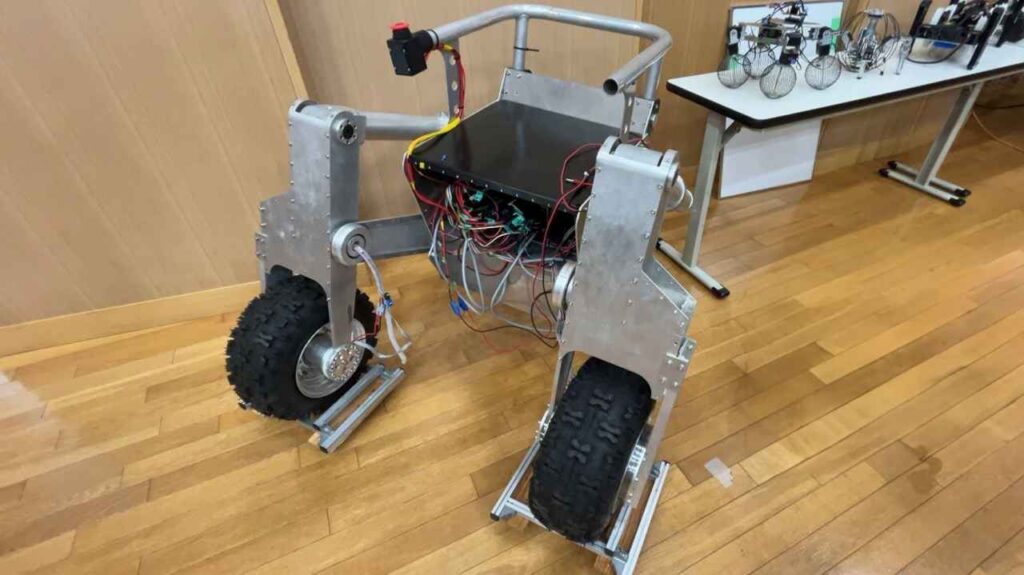
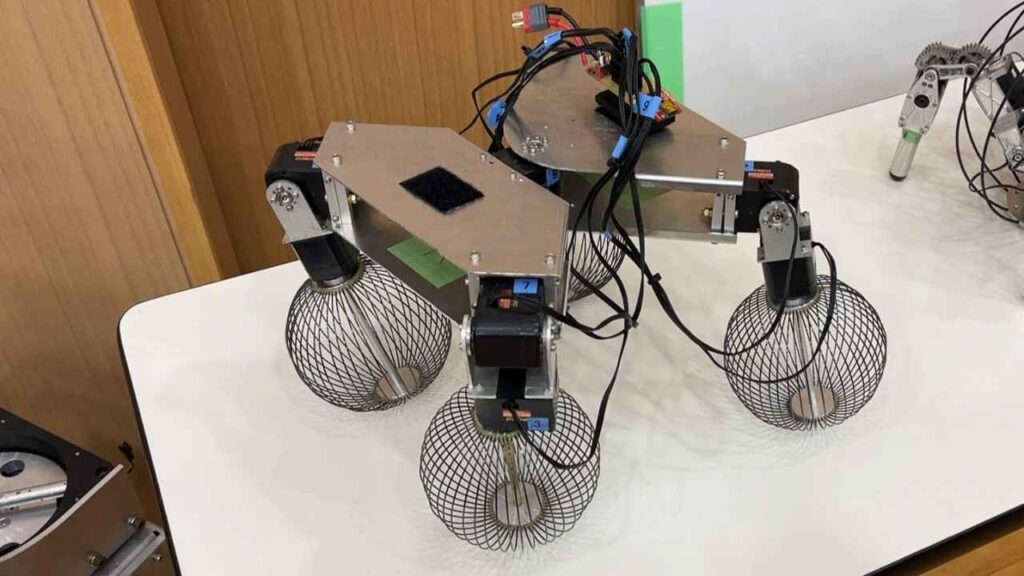
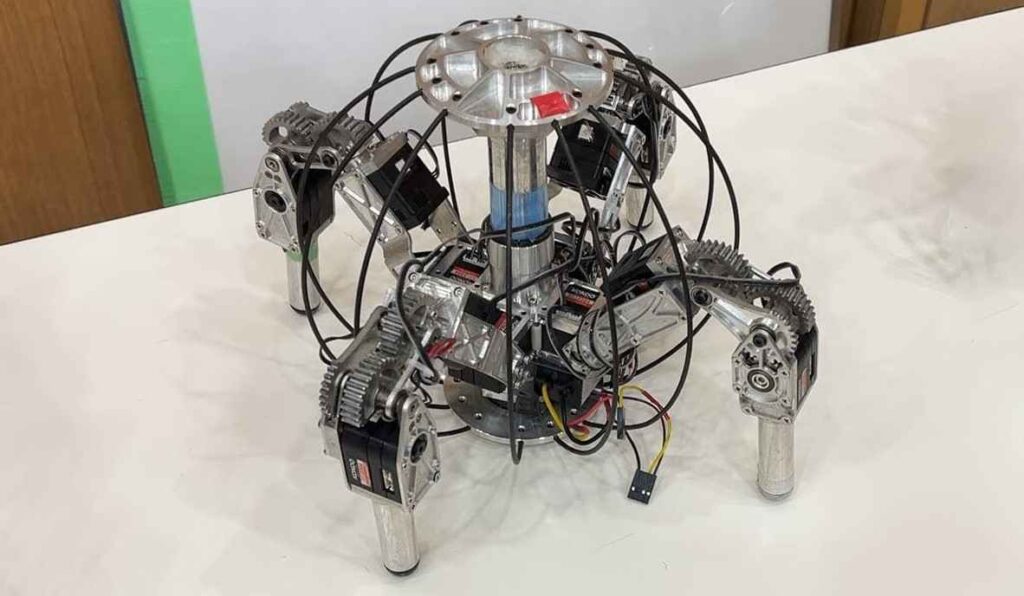
研究室紹介の一環として,展示されていたロボットの一部を紹介します.
(都合により背景を加工しています.)
ベースとなるロボットがあることもありますが,多くは未来ロボティクス学科の学生が0から設計・製作したものになります.
ソフトウェアも多くは独自に開発しています.
ものづくりの能力の高さが学科の一つの特長となっています.













12月8日(日)に茨城県つくば市で開催された屋外自律移動のチャレンジ「つくばチャレンジ」に未来ロボティクス学科から4チーム参加しました.
横断歩道を含む市街地の一般道を自律的に(人の手を借りず)走行することが求められるチャレンジで,様々な技術が必要となります.
各チームそれぞれの課題を設定して,長期間ロボットの開発を行い本走行に望みました.
今年は最長1000mを自律走行することができました.
来年度に向けて自律移動ロボットのさらなる開発を行っていきます.
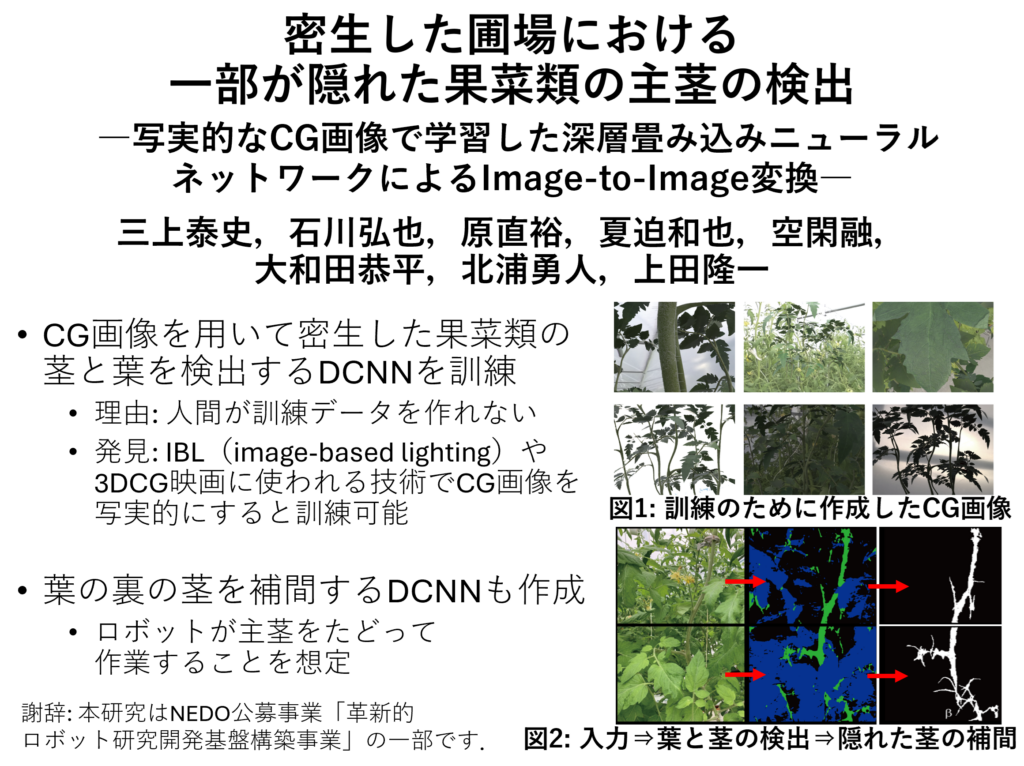
2022年に日本ロボット学会誌に掲載された上田研からの論文が、日本ロボット学会第38回学会誌論文賞に選ばれました。ヤンマーホールディングス株式会社さんとの共同研究でした。(現在は契約期間が終了しています。)
内容については上田研究室のページのとおりで、畑に植わっている葉や茎の茂った作物の木から、葉・茎・背景を識別し、さらに葉に隠れた茎がどこにあるか推定して見えている茎とつなぐというものです。この分野は進歩が早いのですが、当時はリアルに作ったコンピューターグラフィックを使って識別器(一般にはAIと呼ばれるものの一種)を学習させ、ほぼ緑色の画像から葉や茎を検出できるようにしたことが画期的でした。上田は理屈は分かるもののCGも深層ニューラルネットワークも直接扱ったことがないんですが、当時の学生さんにいろいろ無理をお願いして、なんとか形にできました。


表彰式の後は懇親会があり、上田はビールを飲みすぎましたがそんなことはどうでもよく、とにかく共著者のみなさま、契約関係や特許関係でいろいろ面倒を見ていただいた事務方のみなさま、候補の論文をグエーと言いながらたくさん読んだ表彰委員の皆様、たいへんありがとうございました。

8/1(木)~5(月)に集中授業「ロボティクスチャレンジ」を新習志野キャンパスで実施しました.
2014年から実施されている授業で,ベトナム国家大学の学生と未来ロボティクス学科の学生が5日間でロボットを開発します.最終日にはコンテストも行います.
(過去には台北科技大学の学生も参加していたことがありました.)
未来ロボティクス学科からは11名の学生が参加して,ベトナムの学生とチームを組んで,ロボットを製作しました.5日間のプログラムの中で,お互いに議論したり,協力してロボットを製作することで,自然と仲良くなる様子が見られました.
