« 日刊工業新聞の「芽はぐくむ研究室」に米田完教授の4足歩行ロボ | メイン | 芝園キャンパス新校舎完成間近 »
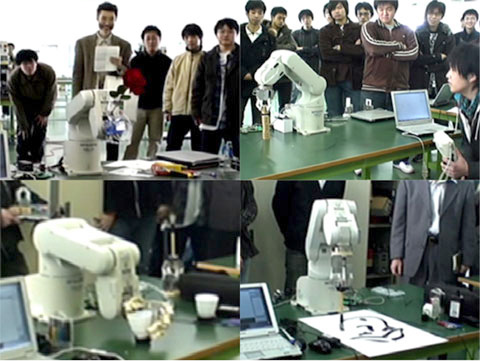
各自がオリジナルのロボットハンドを設計・製作し、市販のマニピュレータに取付けてデモンストレーションを行いました。もちろん動作プログラムも自作です。授業で学んだマニピュレータの運動学・逆運動学を駆使しています。 くわしい授業の紹介はこちら: http://www.robotics.it-chiba.ac.jp/yoneda/Seisakuron3WEB/seisakuron3.html
投稿者: ky 日時: 2008年02月04日 20:20 | パーマリンク
左は個別の記事ページですTOPページに戻る